![]()
IPS - Escola Superior de Tecnologia de Setúbal - Lu Ban Workshop Portugal
Manual Servo Motor ¶
Autores: Alexandre Geraldo e Luís Barroso
Indice ¶
-
Noções sobre sobre o servo para PROFINET
-
Introdução aos comandos de controlo de movimento
-
MC_MoveJog
Básico I ¶
Durante esta primeira parte será ensinado o básico sobre o servo. Desde as bases de configuração até às bases de programação, abordando apenas a informação essencial para conseguir por em prática uma ideia implementando um servo no processo. Serão ainda abordados alguns conceitos básicos em relação ao servo e ao método de comunicação utilizado (PTO).
Servos na Oficina Luban ¶
Um servo é utilizado como um atuador em sistemas de controlo automático, ele converte sinais elétricos num movimento angular no veio do motor.
Os servos utilizados nas estações YL-335B (Linha de Produção Automática) na oficina Luban são da Siemens, mais especificamente um motor AC SIMOTICS S-1FL6 e um drive SINAMISC V90 utilizados para a locomoção do “robô” manipulador de transporte.
Configuração Básica do Servo com PTO ¶
Noções sobre Pulse Train Output (PTO) ¶
O CPU dos autómatos disponibilizam quatro saídas geradoras de pulsos, cada saída dessas disponibiliza uma saída para os pulsos e outra saída para direção que permite controlar o servo através da interface de pulsos. As
saídas de pulso proporcionam ao drive do servo o pulso necessário para o movimento do motor.
As saídas PTO geram ondas quadradas de frequência variável que permitem especificar a velocidade a que o motor se irá mover, sendo estes pulsos gerados com base na informação fornecida durante a configuração do servo no TIA Portal.
Configurar servo no TIA Portal V15 ¶
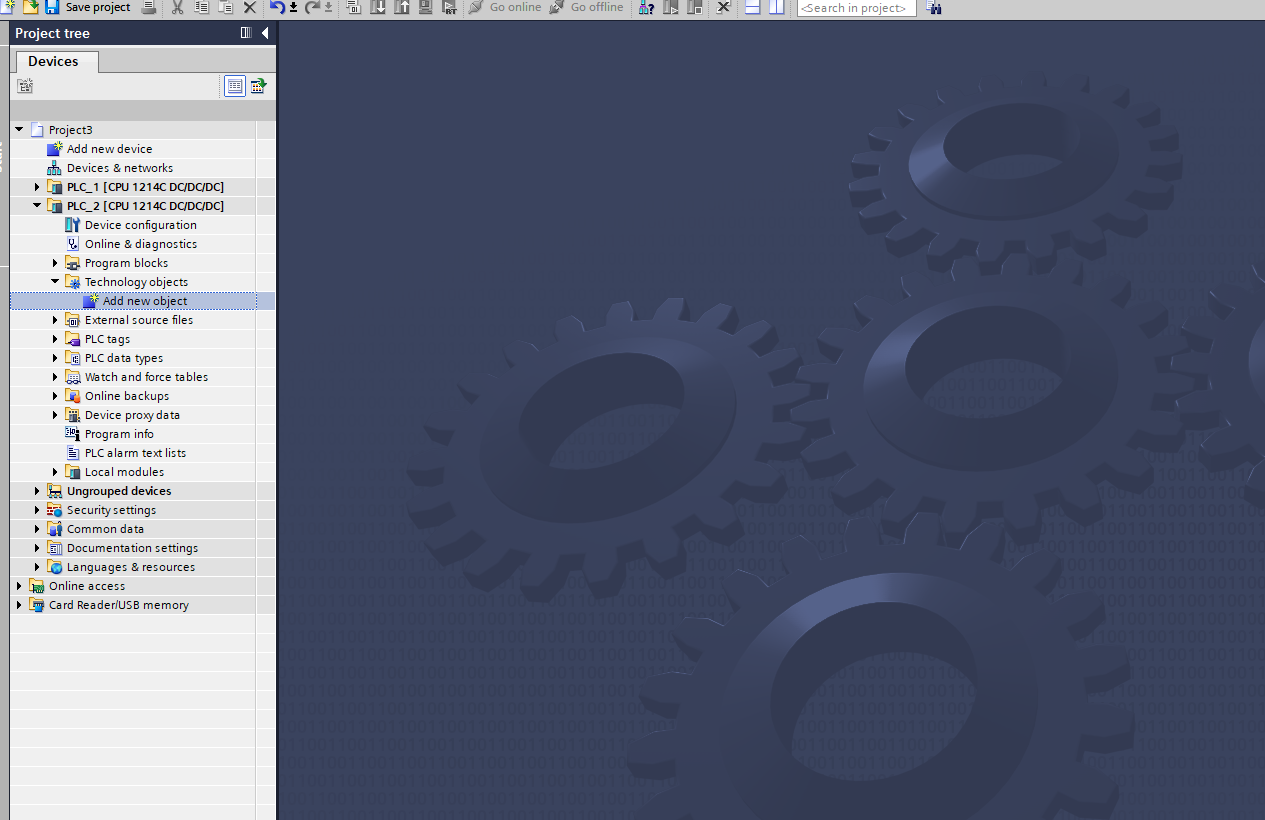
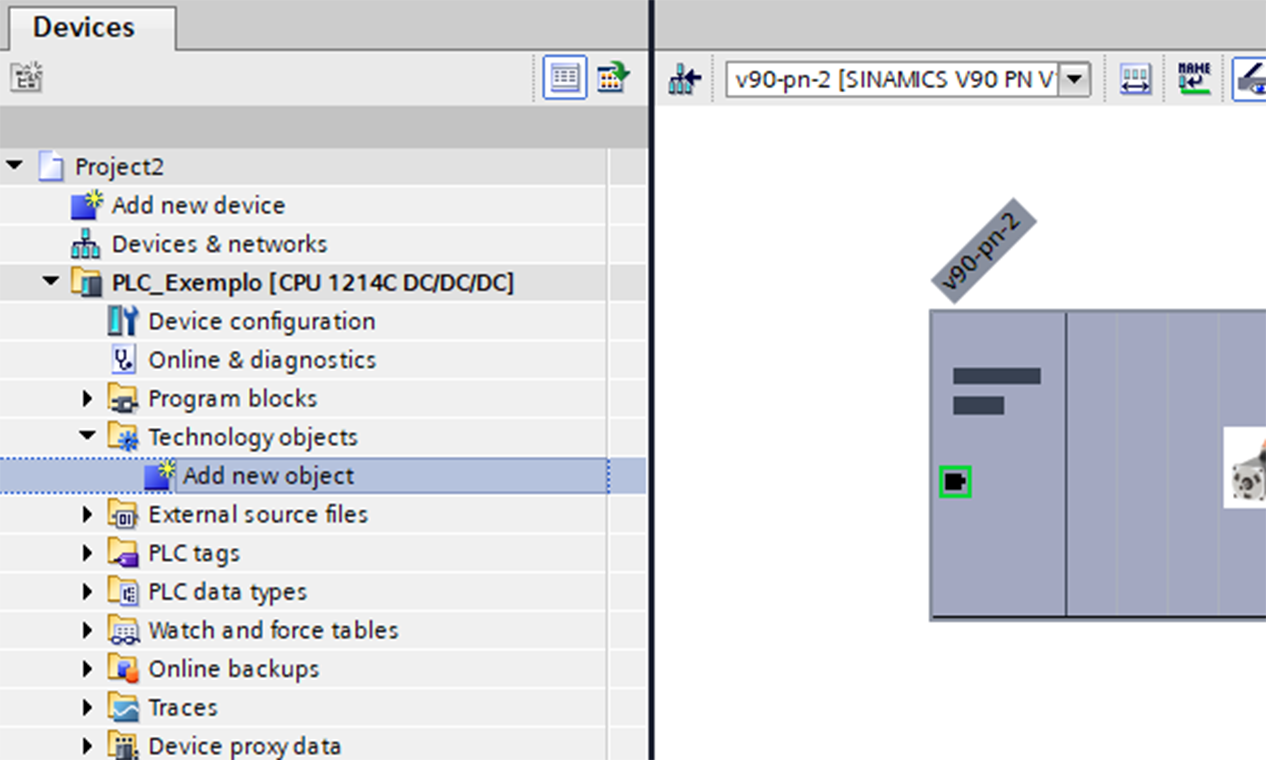
1.Na aba “Technology objects” clique em “Add new object”.
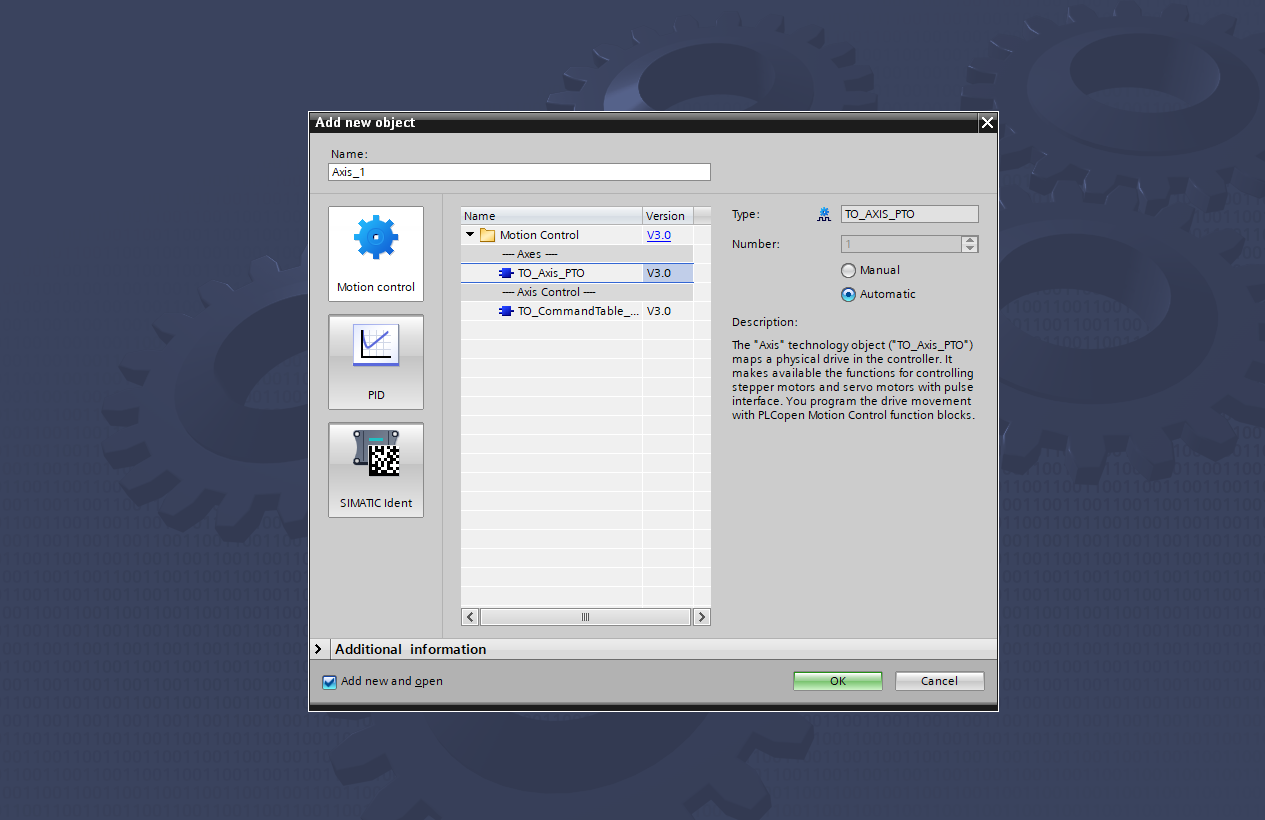
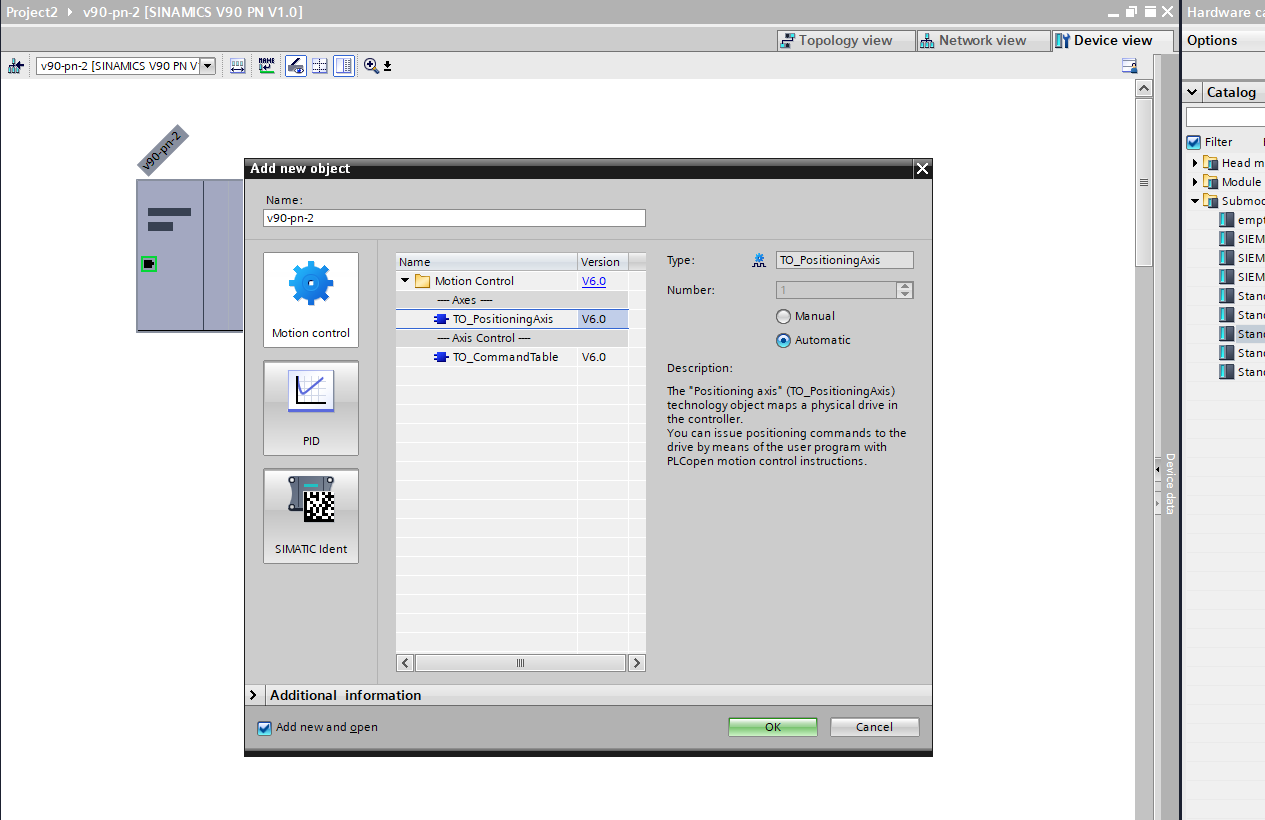
2.No menu “Motion Control” na pasta “Motion Control” selecione “TO_PositioningAxis” .
3.Na janela de configuração do Eixo, em “General” altere o nome do servo em “Axis name” , selecione o método de controle PTO favorecido pelo método de instalação do drive no PLC e nas unidades de medida em “Position Unit” escolha “mm” (milímetros).
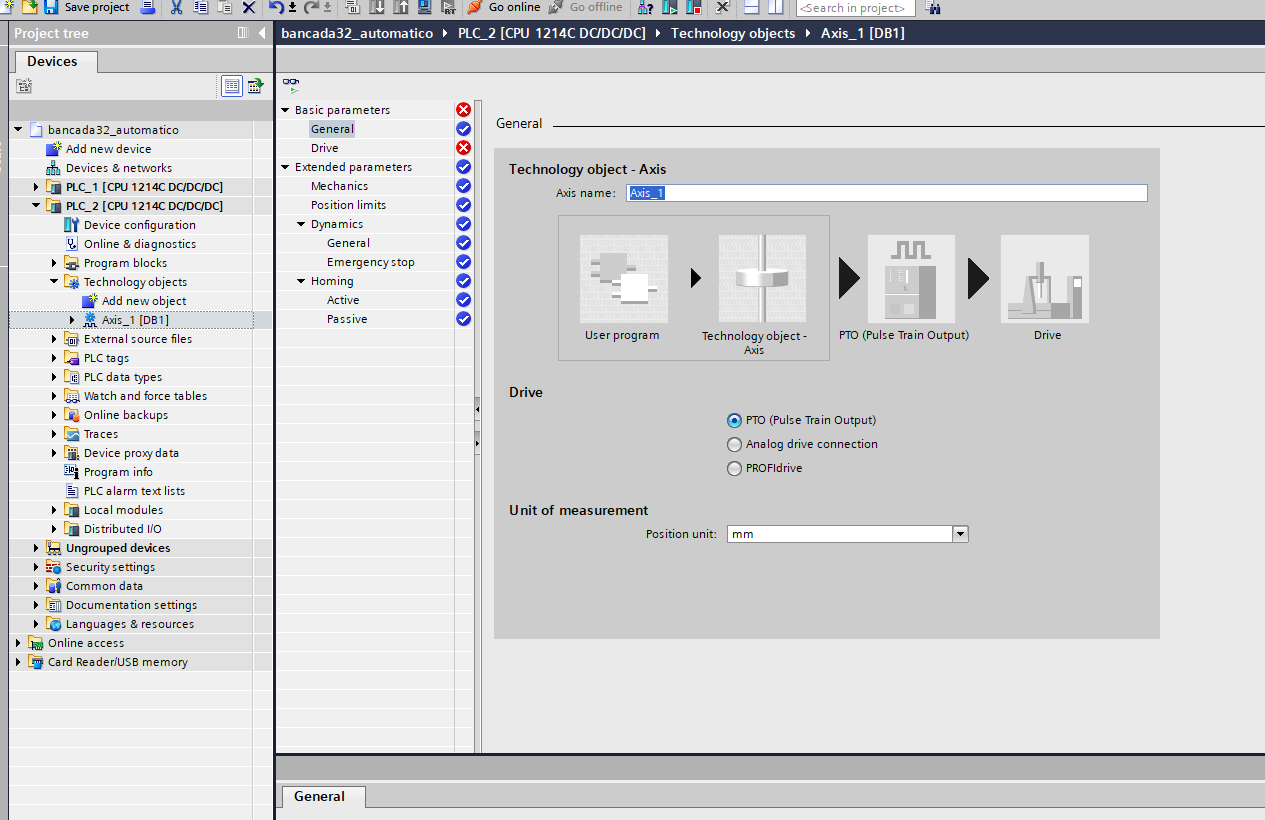
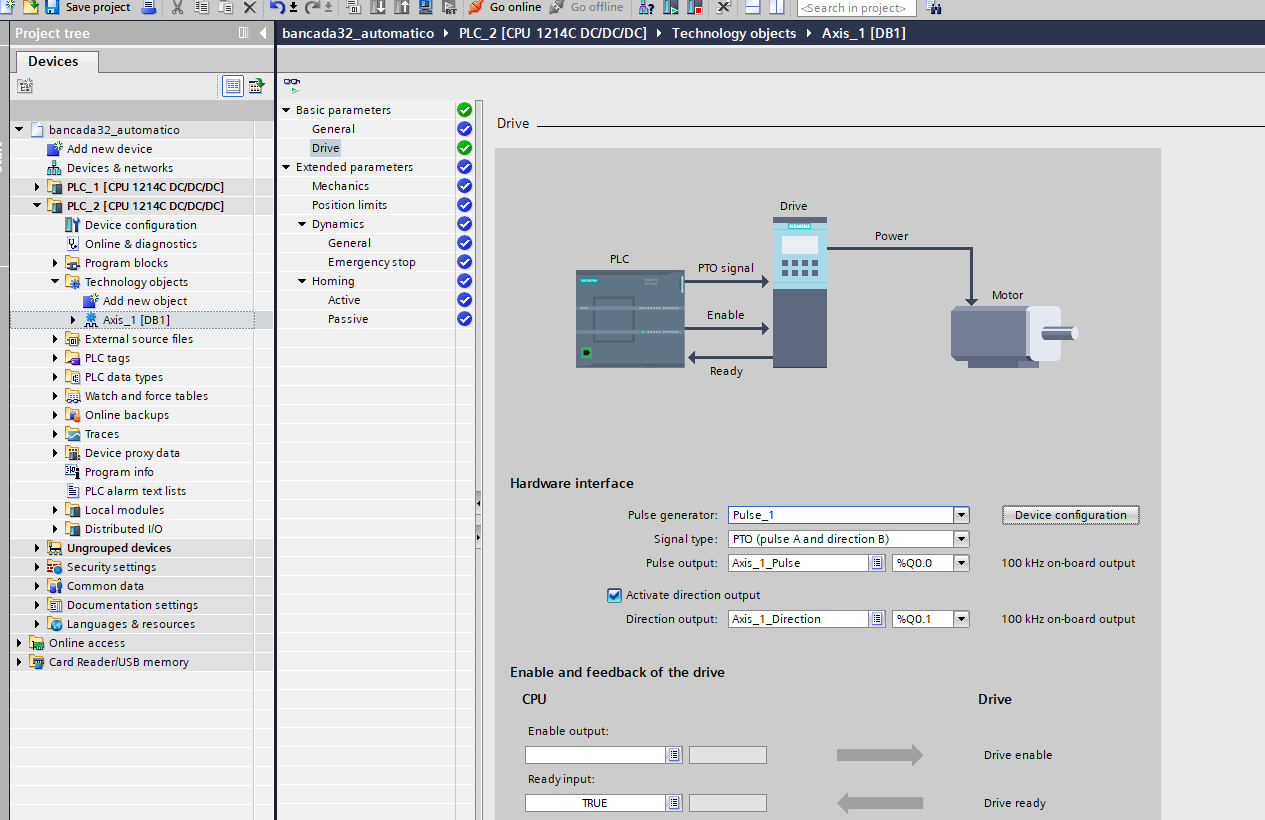
4.No menu lateral “Drive” , escolha um dos geradores de pulsos disponíveis em “Pulse generator” e de seguida certifique-se que as saídas de pulso e de direção estão ligadas ao drive.
5.Em “Mechanics” no menu lateral serão colocados alguns valores parametrizados pelos equipamentos ou valores obtidos através de uma calibração. Para os servos do laboratório podem ser usados os valores na (Imagem 5).

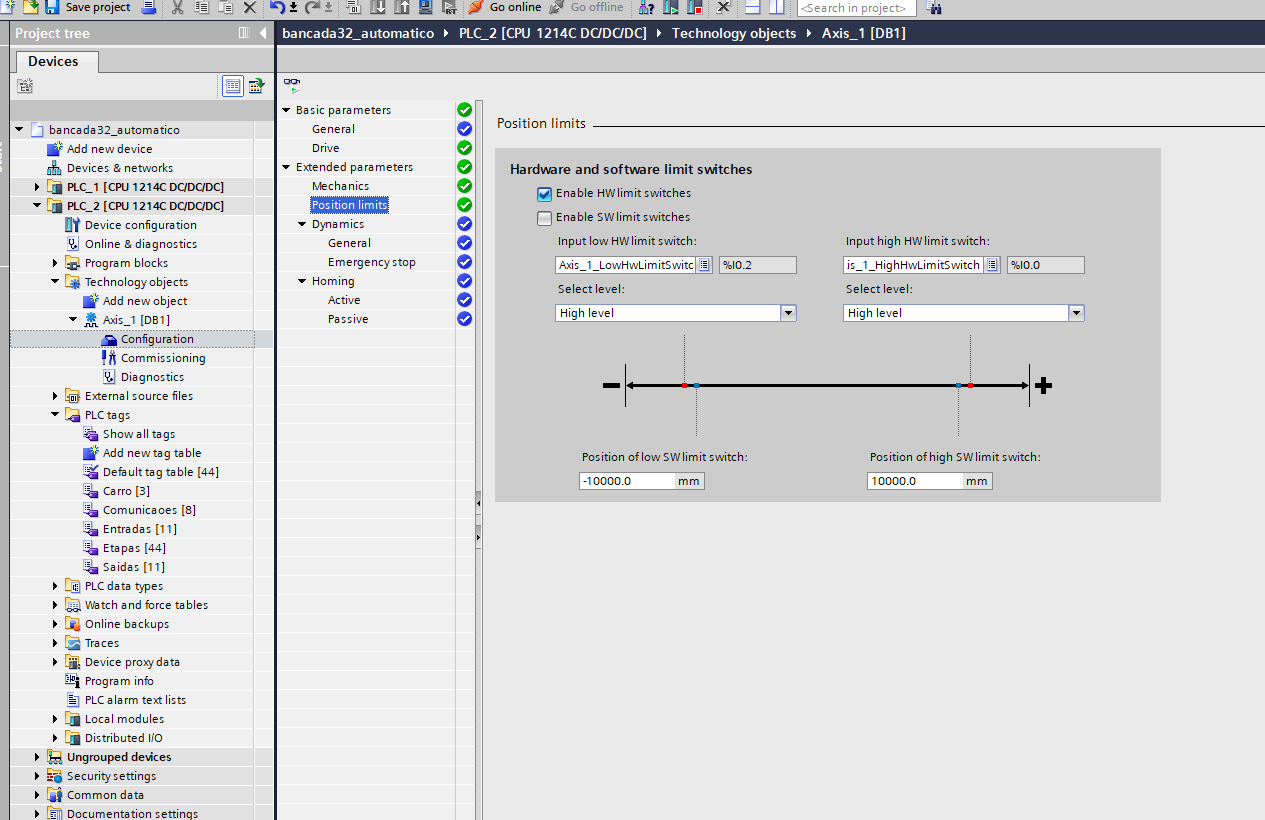
6.Em relação aos limites de posição ative a opção “Enable HW limit switches” e opcionalmente “Enable SW limit switches” . Insira as entradas de alta (para valores de medida máximos) e de baixa (para valores de medida mínimos) e selecione em ambos a opção “High level” para que o servo dispare a paragem de emergência quando um dos fins de curso seja acionado.
7. (Opcional) Em “Dynamics” todos os valores poderão ser escolhidos pessoalmente tendo em conta a segurança das pessoas ao seu redor, a integridade do equipamento e o que se pretende para o processo.
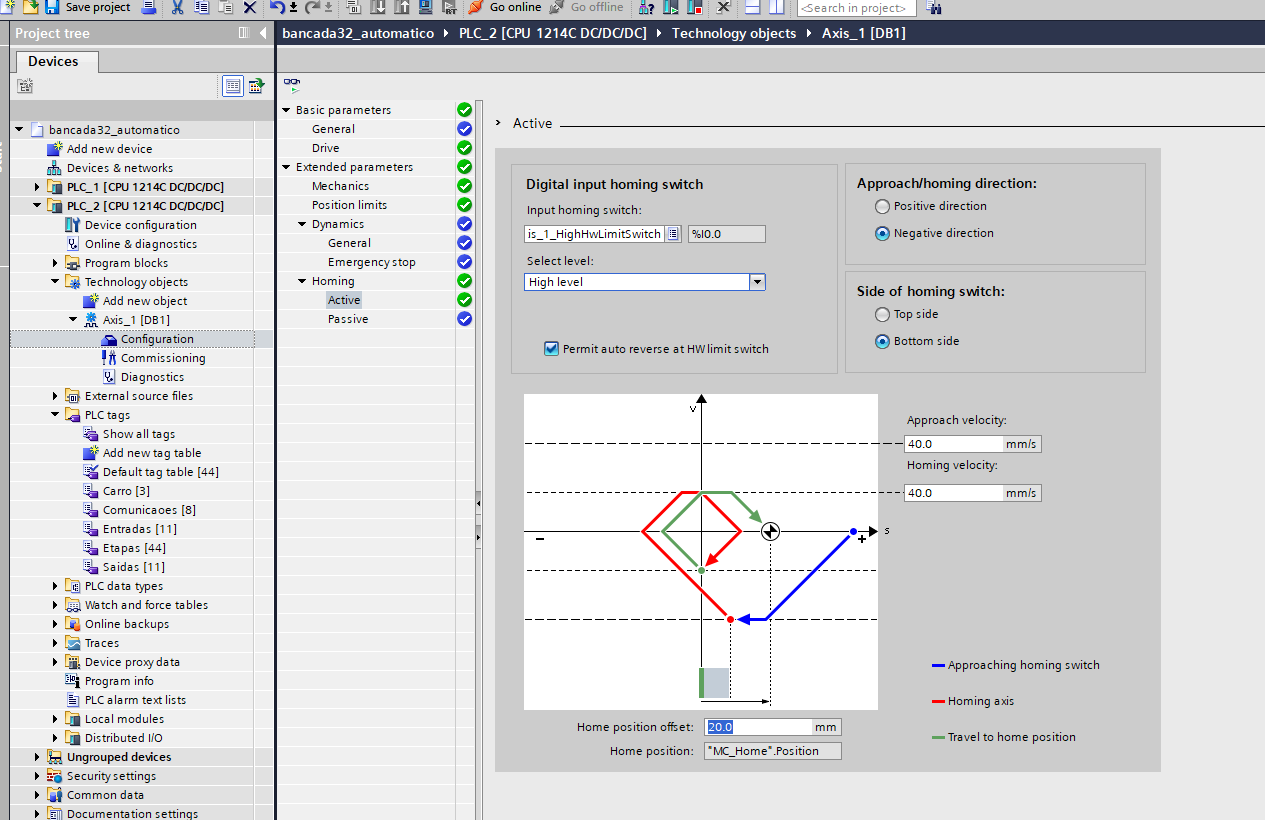
8.Em “Homing - Active” selecionaremos a entrada do sensor referente à posição home, escolha “Negative direction” , ative “Permit auto reverse at HW limit switch” e calibre as velocidades.
9.E a configuração do Servo está concluída.
Configuração Básica do Servo em PROFINET ¶
Noções sobre sobre o servo para PROFINET ¶
Para o funcionamento do SINAMICS V90 PN no modo “Speed Control (S)”, a seguinte lista de telegrams são suportados:
-
Standard telegram 1
-
Standard telegram 2
-
Standard telegram 3
-
Standard telegram 5
-
Standard telegram 102
-
Standard telegram 105
O standard telegram 1 só pode ser usado em modo “Real-time” (RT mode). Os standard telegram 2, 3 e 102 podem ser usados tanto em modo RT ou em modo “Isochronous Real-time” (IRT mode), dependendo do controlador I/O. Os standard telegrams 5 e 105 apenas suportam o modo IRT e só podem ser usados com TIA Portal V14.
Os telegrams 1, 2 e 102 são usados para controlo de velocidade do eixo enquanto os telegrams 3, 5 e 105 são usados para posicionamento do eixo pois estes telegrams possuem a “Posição atual” do encoder (Gn_XIST1).
Se usado um SIMATIC S7-1200 para controlo de posição então TO (Technology Object) Positioning Axis terá de ser usado. O “TO Positioning Axis” apenas suporta os telegram 1, 2 e 3.
NOTA: SIMATIC S7-1200 apenas suporta comunicação em modo RT.
Configurar definições PROFINET no SINAMICS V-ASSISTANT ¶
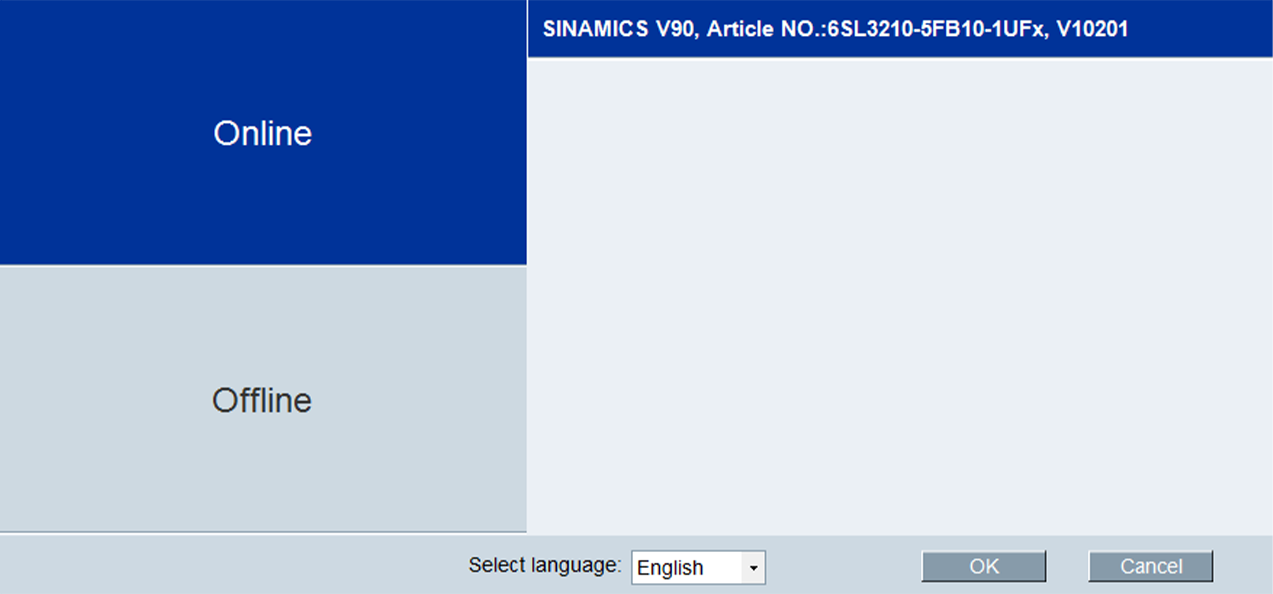
1.Abra o SINAMICS V-ASSISTANT e certifique-se de que tem o drive a configurar ligado ao PC via USB.
2.Clique em online, selecione o equipamento a configurar e clique em “Ok” .
3.Na aba “Select drive” clique no botão “Select motor” .
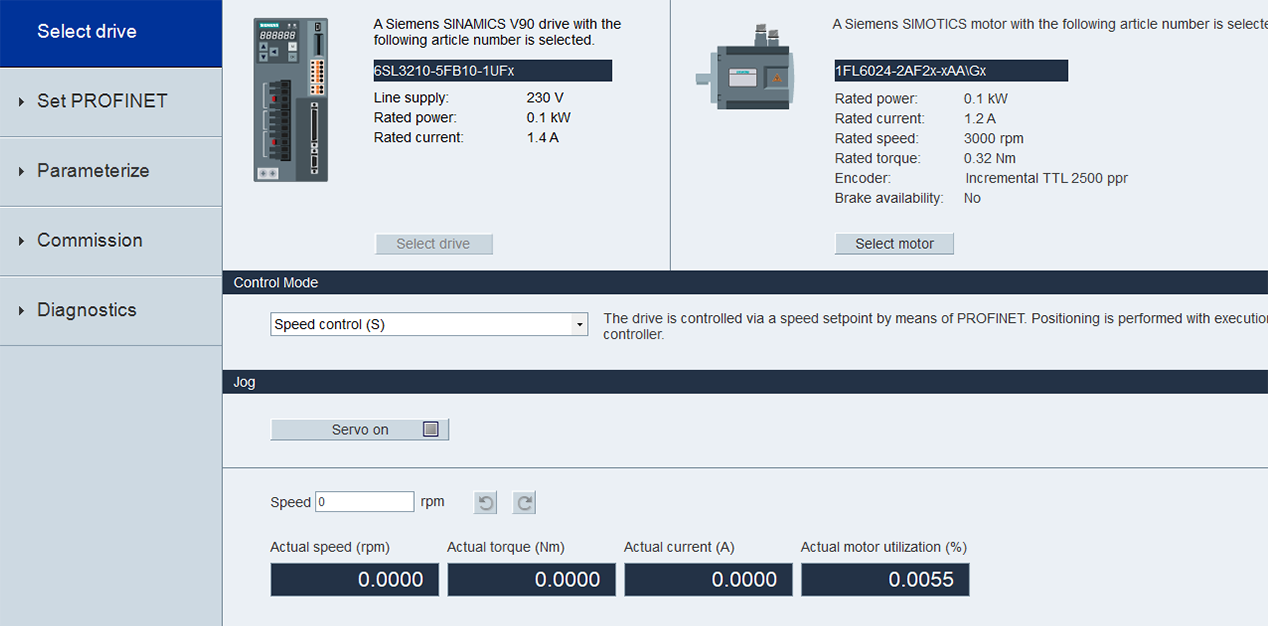
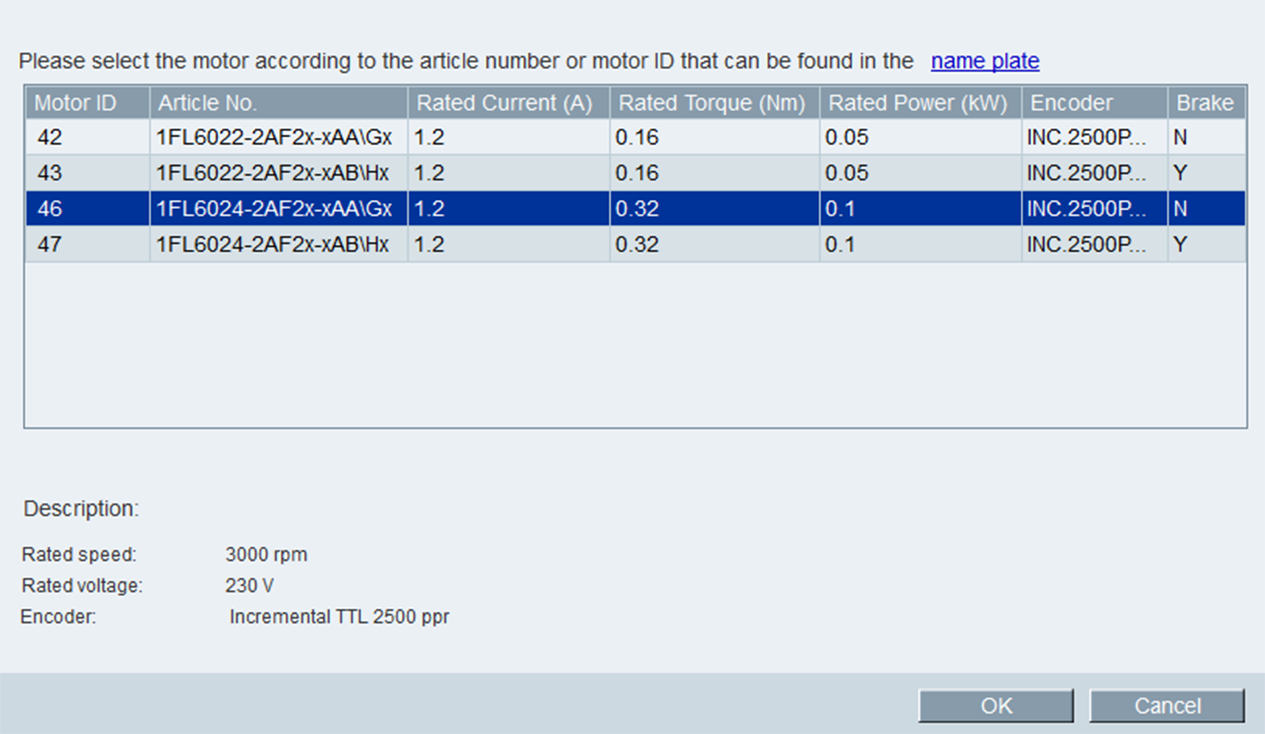
4.No menu de seleção do motor, escolha a opção cujo “Motor ID” corresponda ao seu motor.
NOTA: O ID do motor pode ser encontrado na placa de identificação no motor.
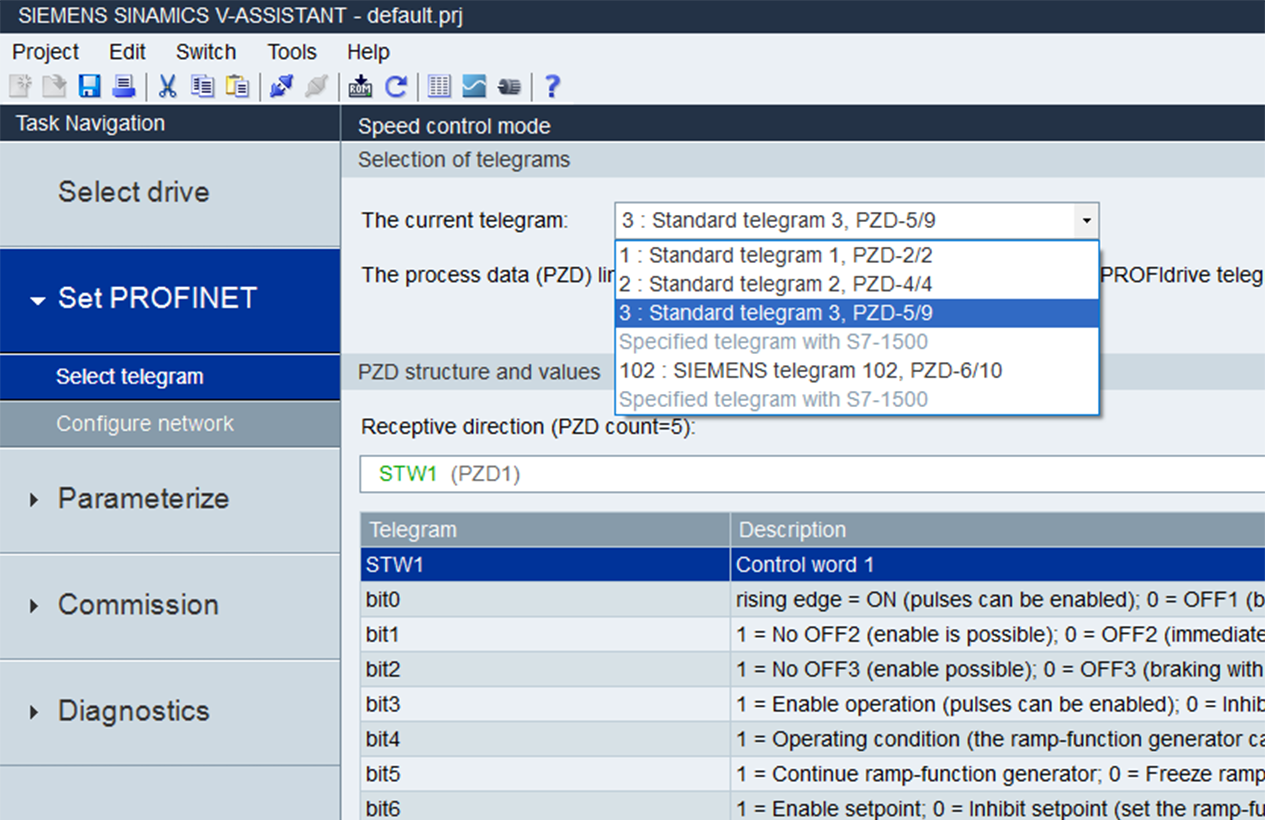
5.De seguida na aba “Set PROFINET” em “Select telegram” escolha em “The current telegram” o telegram adequado às suas necessidades.
NOTA: Para melhor entender desta fase leia as “Noções sobre o servo para PROFINET”.
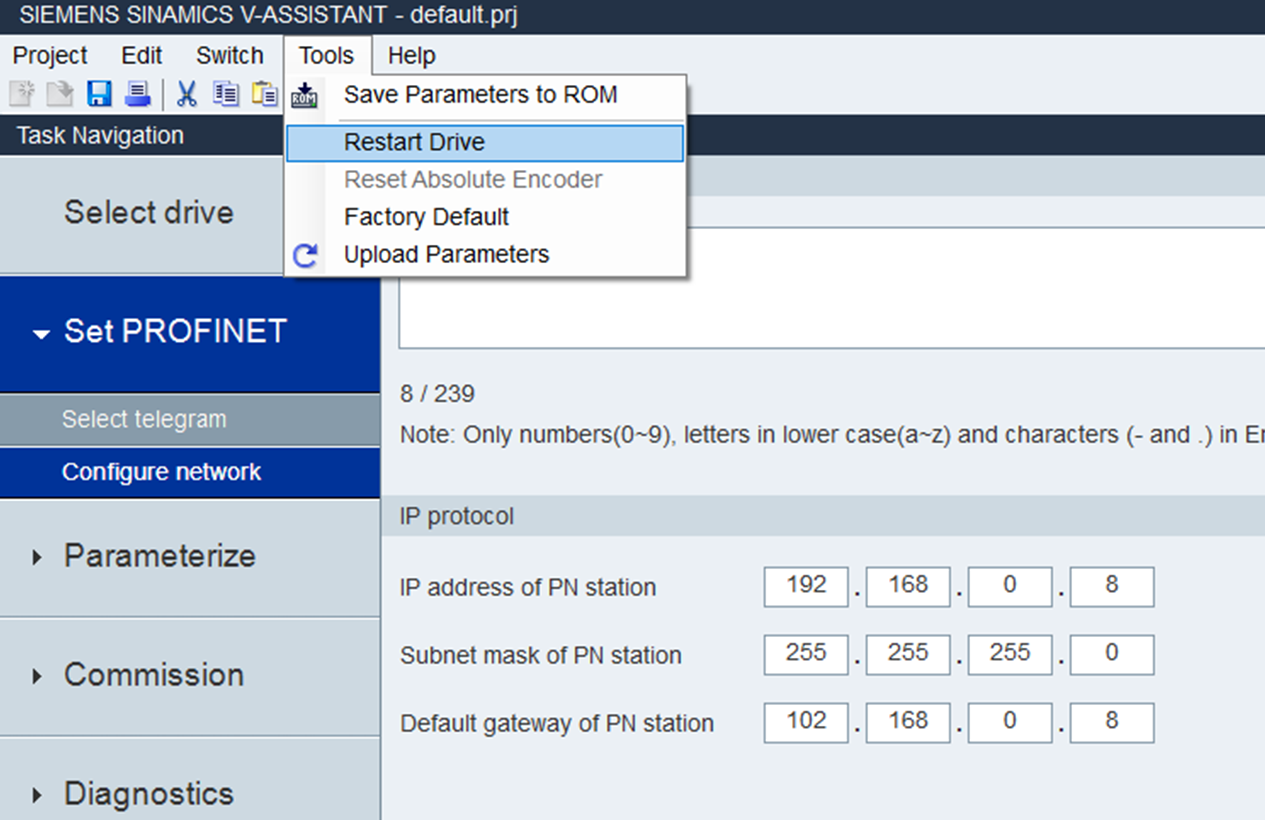
6.Ainda em “Set PROFINET” vá a “Configure network” e modifique o nome de identificação do equipamento e o seu respetivo IP para a rede. Clique por fim no botão “Save and active” .
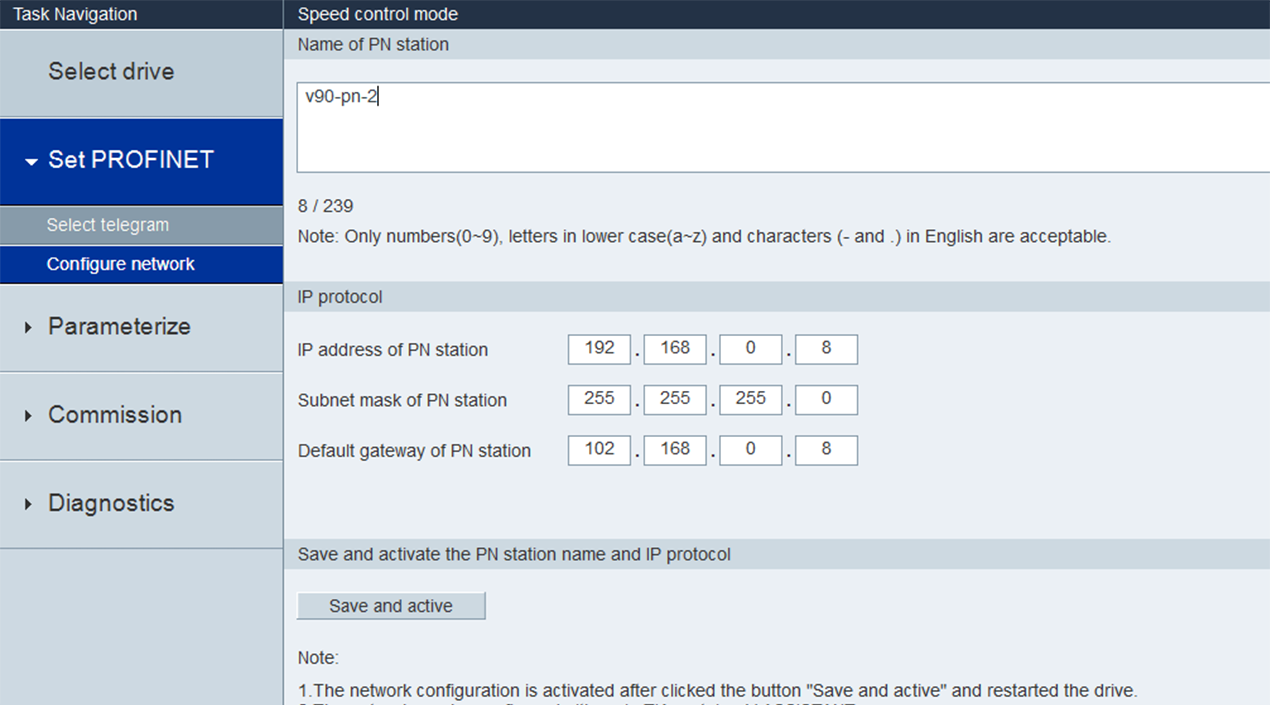
7.Concluídos os passos anteriores, va na barra superior do V-ASSISTANT, em “Tools” clique "Restart Drive” . E fica concluída a primeira fase da configuração.
Configurar definições PROFINET no TIA Portal V15 ¶
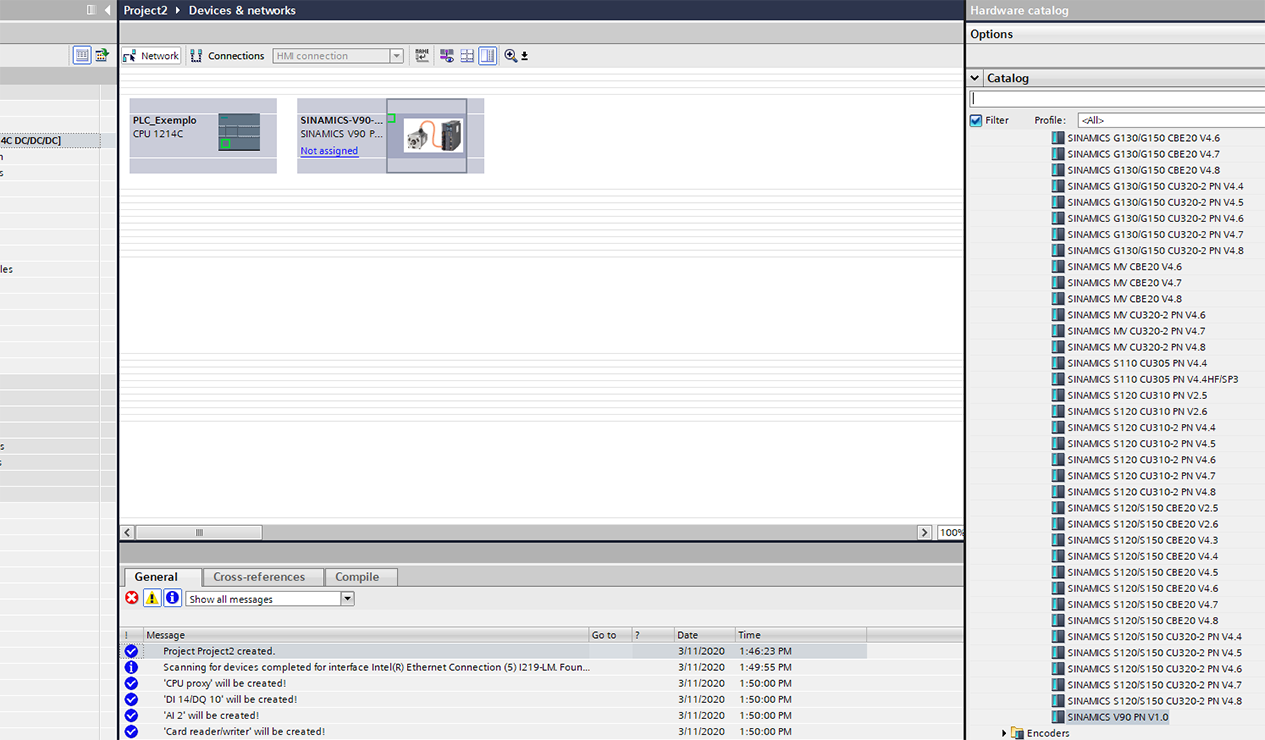
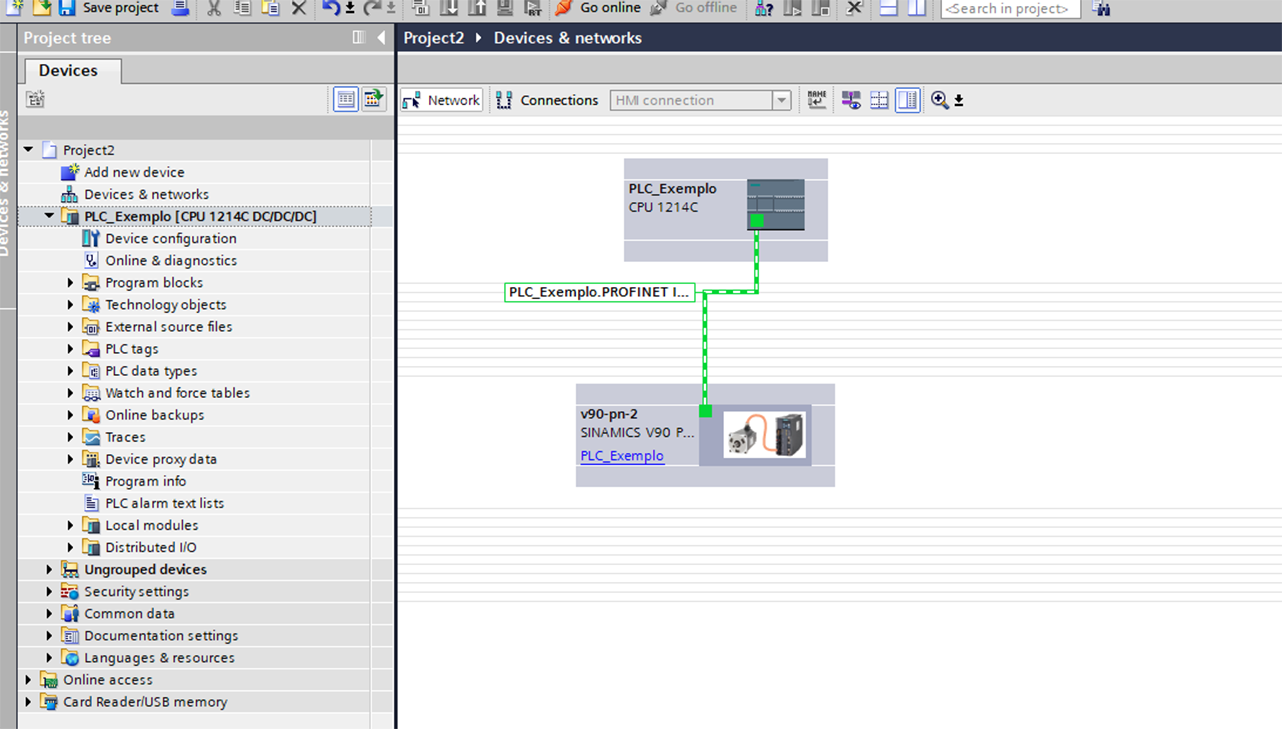
1.Em “Network view” clique na barra lateral “Hardware catalog” , clique em **“Other field devices > Other field devices > PROFINET IO > Drives > SIEMENS AG > SINAMICS ** e dê duplo-clique sobre “SINAMICS V90 PN V1.0”
NOTA: O mesmo terá de aparecer em “Network view” como no exemplo.
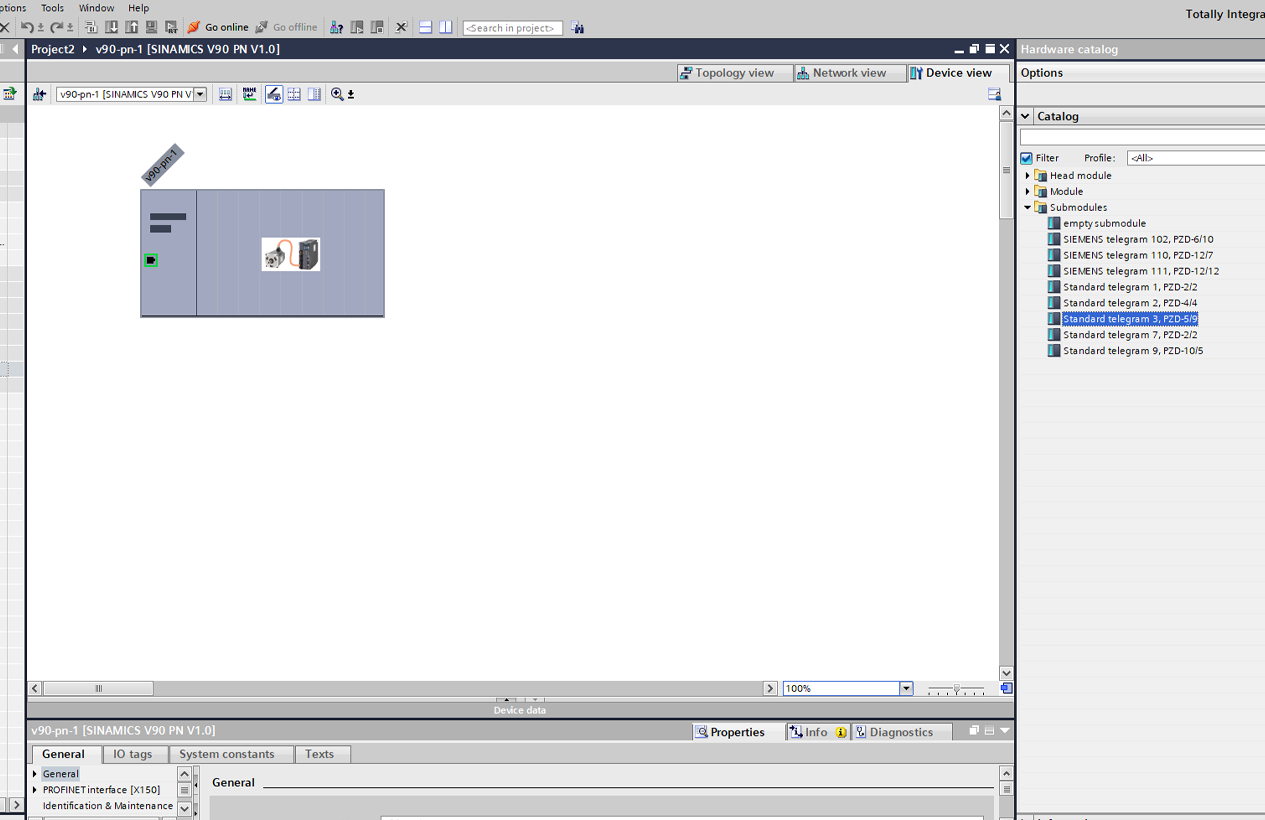
2.Dê duplo-clique sobre o V90 na “Network view” e na janela do dispositivo clique no menu lateral “Hardware catalog” e em “Submodules” e dê um duplo-clique sobre o telegram escolhido durante a configuração do V90 com o V-ASSISTANT.
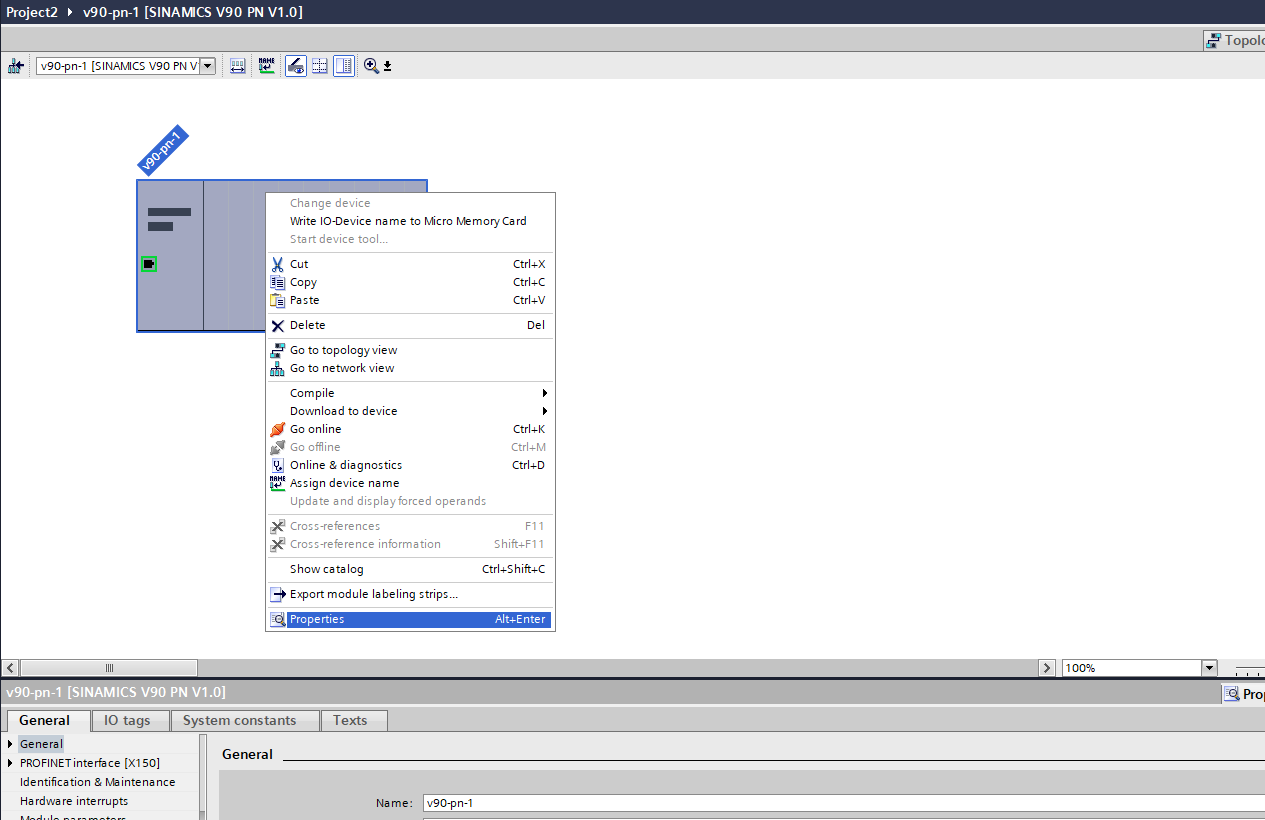
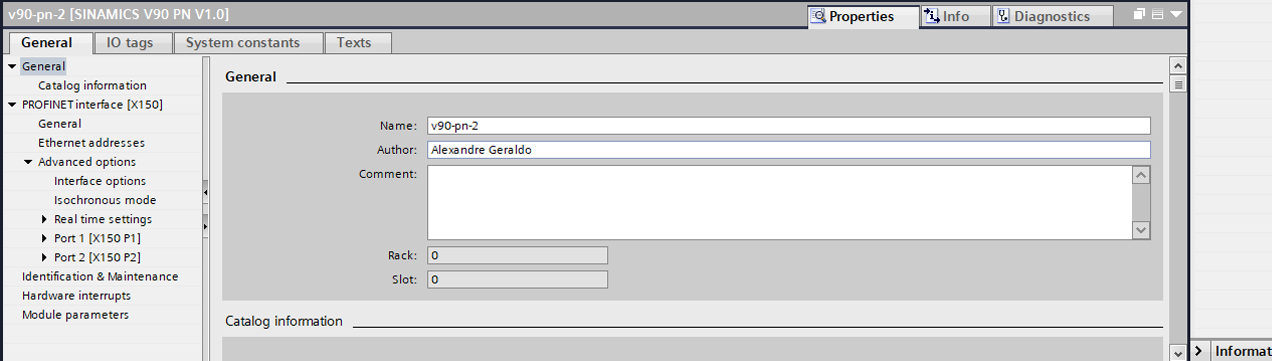
3.Ainda na janela do dispositivo clique com o botão direito no mesmo e clique em "Properties" .
4.Em "General" , nomeie o dispositivo com o mesmo nome dado durante a configuração no V-ASSISTANT.
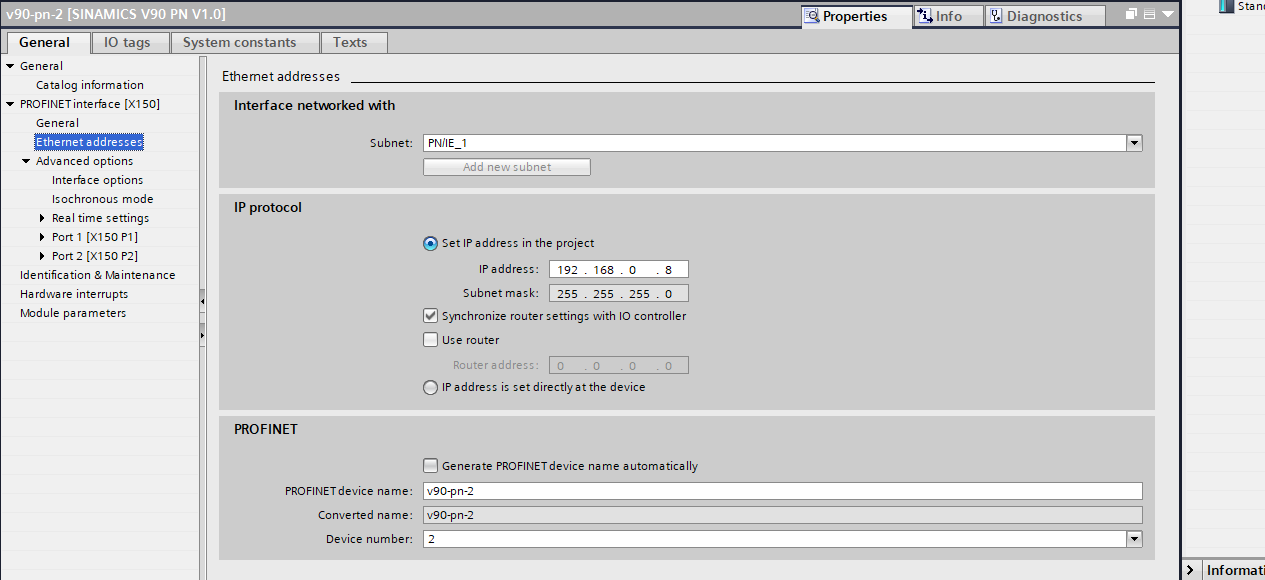
5.Em "PROFINET Interface > Ethernet addresses" coloque o endereço de IP máscara configurados com o V-ASSISTANT. Desmarque a opção "Generate PROFINET device name automatically" e novamente coloque o nome dado ao dispositivo durante a configuração no V-ASSISTANT.
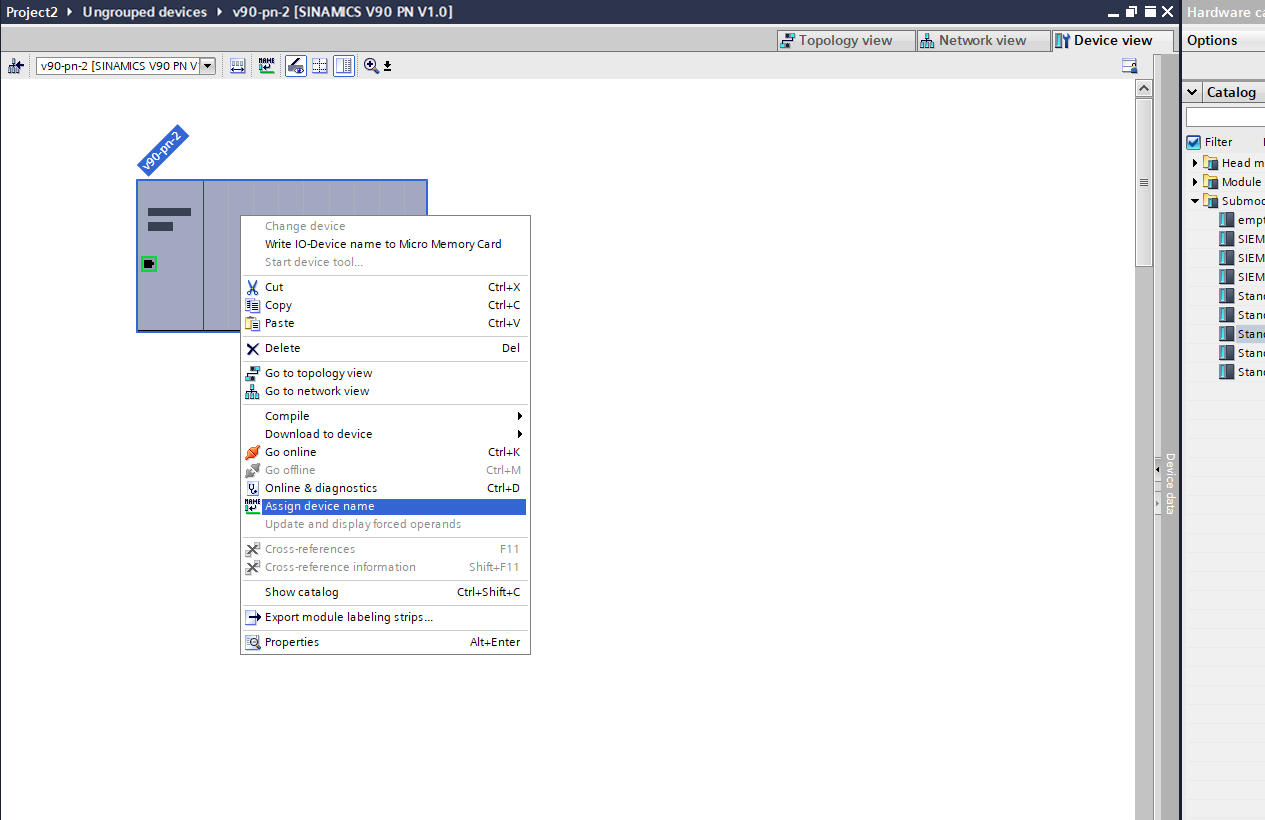
6.Clique novamente sobre o dispositivo V90 e clique na opção "Assign device name" .
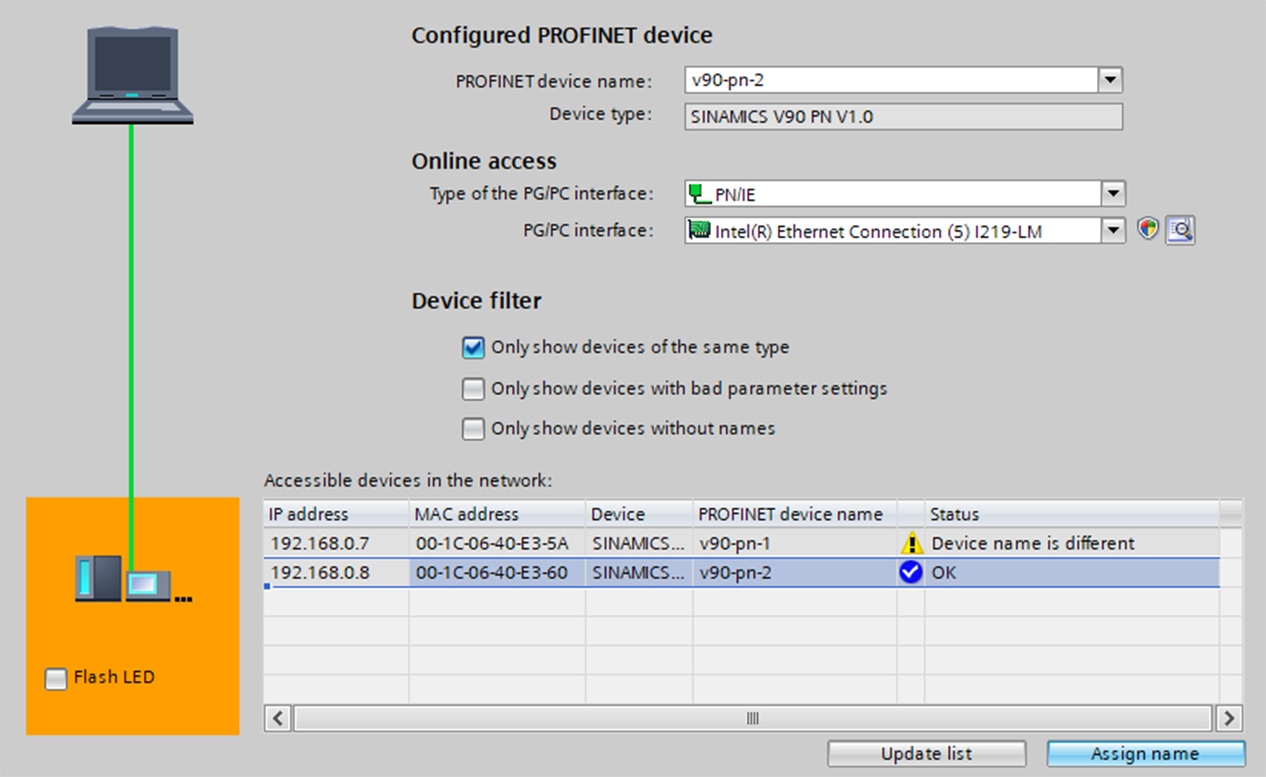
7.Clique em "Update list" e de seguida clique sobre o dispositivo a configurar e clique no botão "Assign name" .
8.Na "Network view" ligue o V90 ao PLC.
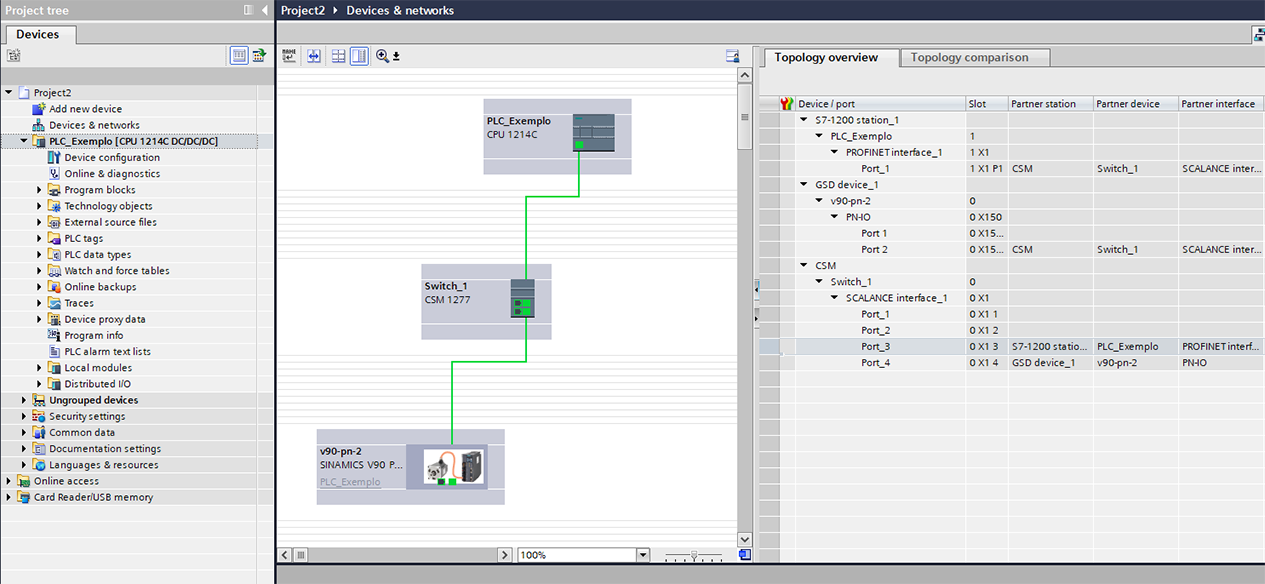
9.Em "Topology view" ” refaça o desenho das ligações físicas entre o PLC e o V90. No exemplo a ligação entre os dois foi feita com um switch pelo que o mesmo teve de ser devidamente adicionado.
NOTA: Este passo é muito importante, sem ele o dispositivo poderá não funcionar corretamente. Tome também atenção à portas nas ligações entre o PLC e o V90.
10.E a configuração do servo em PROFINET está concluída.
Configurar o servo com PROFIdrive no TIA Portal V15 ¶
1.No menu lateral de dispositivos em "Technology Objects" clique em "Add new object" .
2.Em "Motion control" clique sobre "TO_PositioningAxis" , em name coloque o nome para esse eixo (para facilitar dê-lhe o mesmo nome dado ao servo) e clique "OK” .
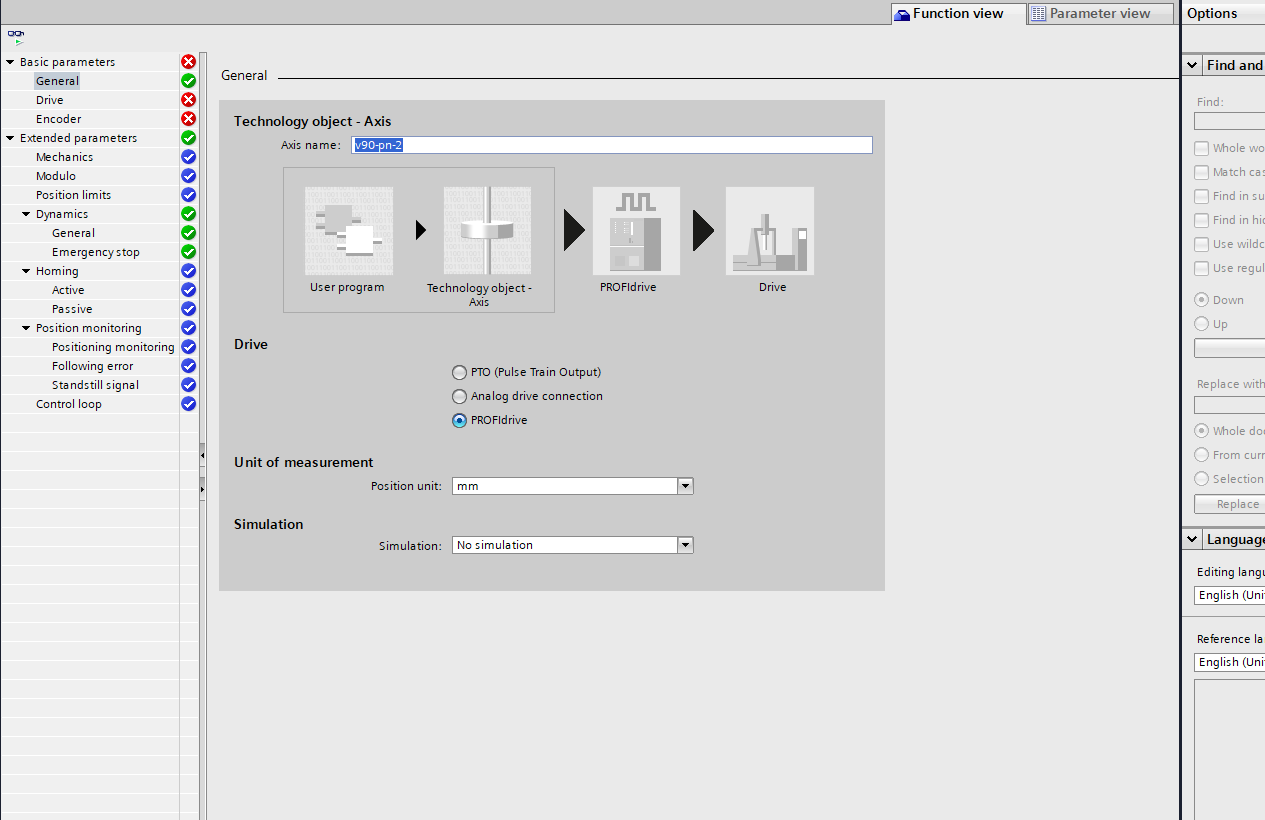
3.Em “General” escolha a opção "PROFIdrive" .
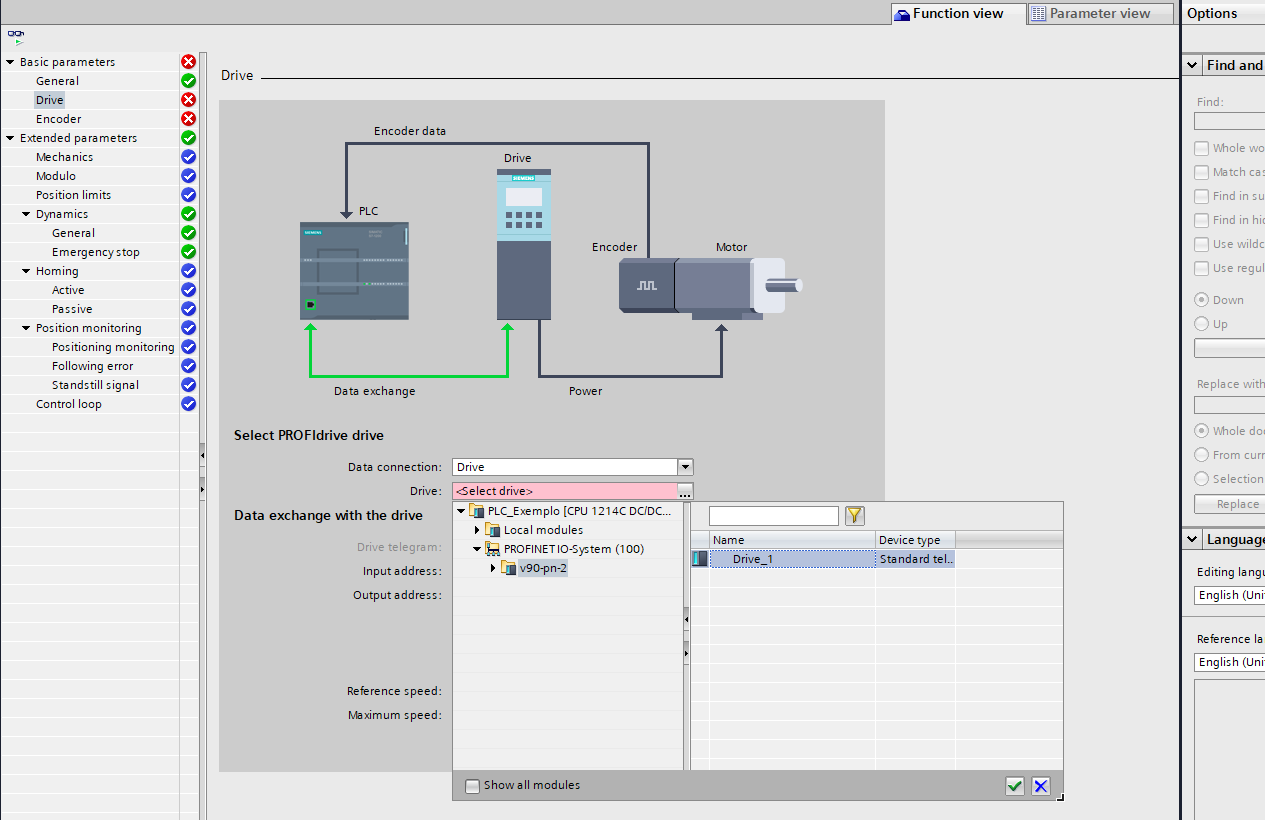
4.Em "Drive" clique nos "..." e escolha o drive configurado.
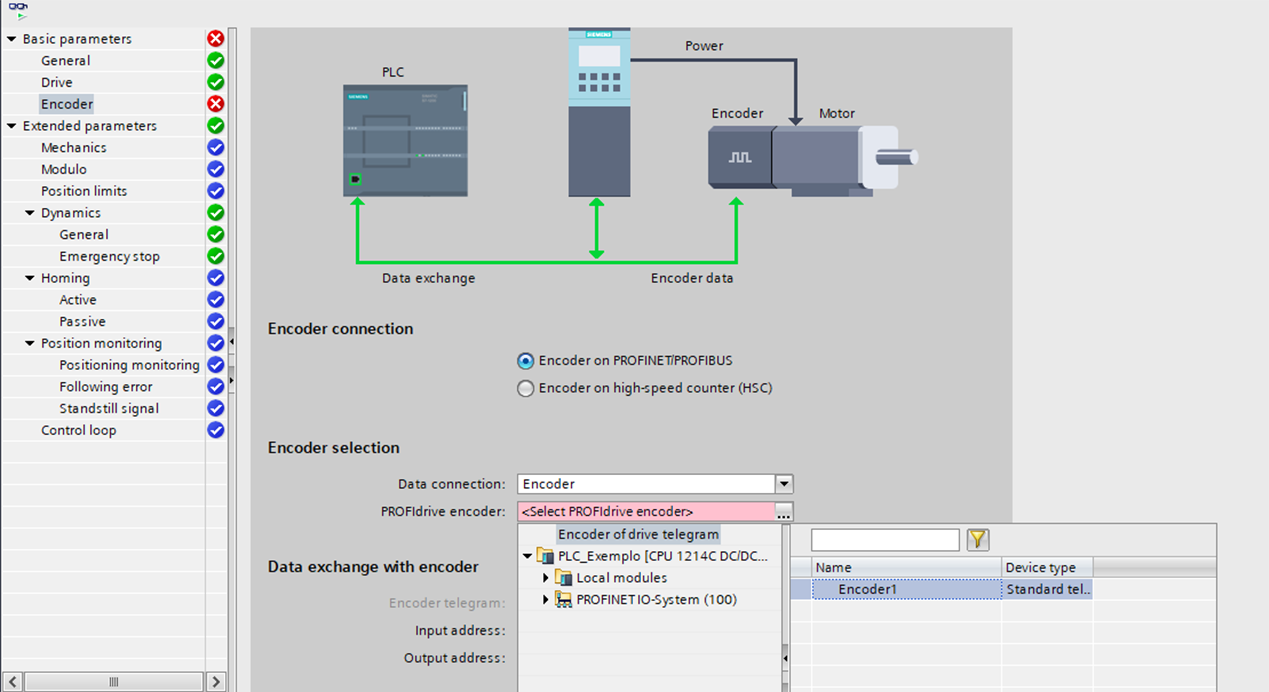
5.Em "Encoder" marque a opção "Encoder on PROFINET/PROFIBUS" . E de seguido no campo a vermelho clique nos "..." e selecione o "Encoder1" .
6. (Opcional) Em "Position limits" ative os "Limit switcher" que pretende usar e configure os seus valores/entradas.
7. (Opcional) Em "Homing" configure o tipo de homing a usar e o respetivo switch de homing.
8.E fica concluída a configuração do servo.
Introdução aos comandos de controlo de movimento ¶
Para programação do Servo o TIA Portal disponibiliza um conjunto de blocos (sub-rotinas) de controlo de movimento que permitem integrar de forma fácil e prática o servo ao nosso processo.
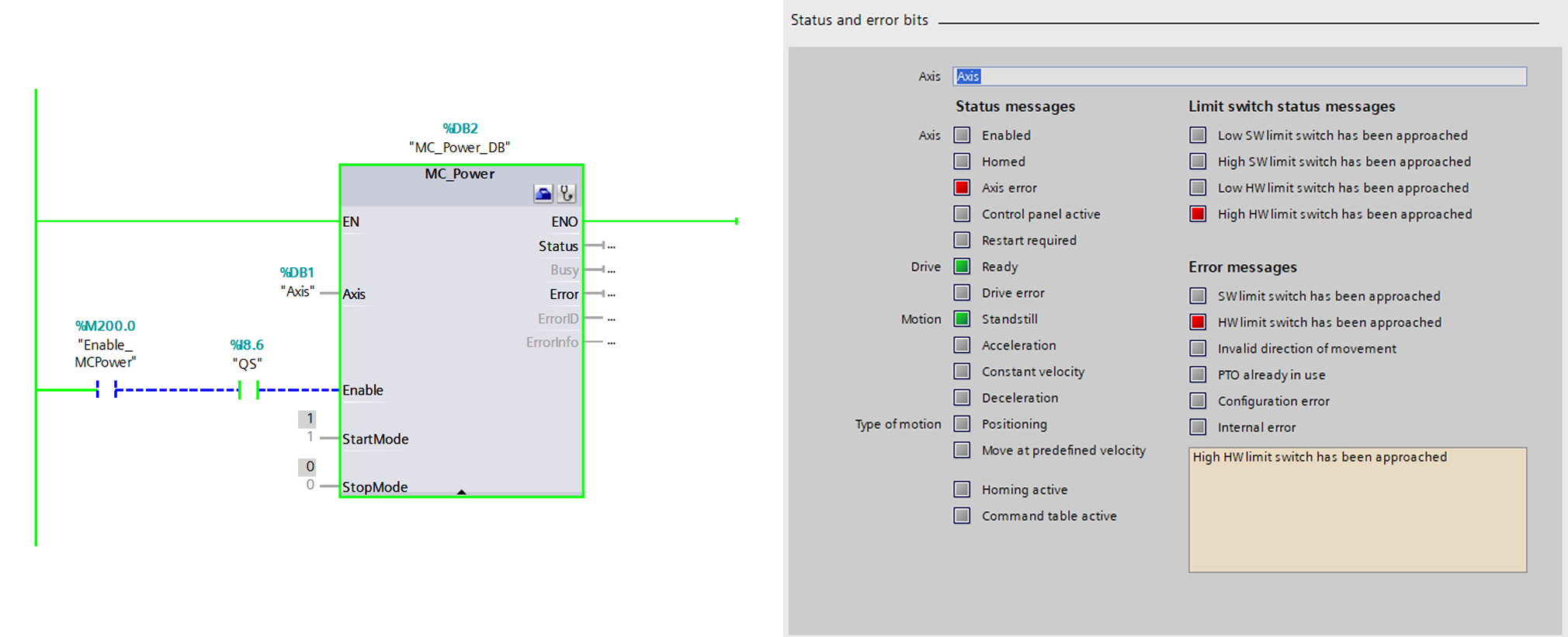
MC_Power ¶
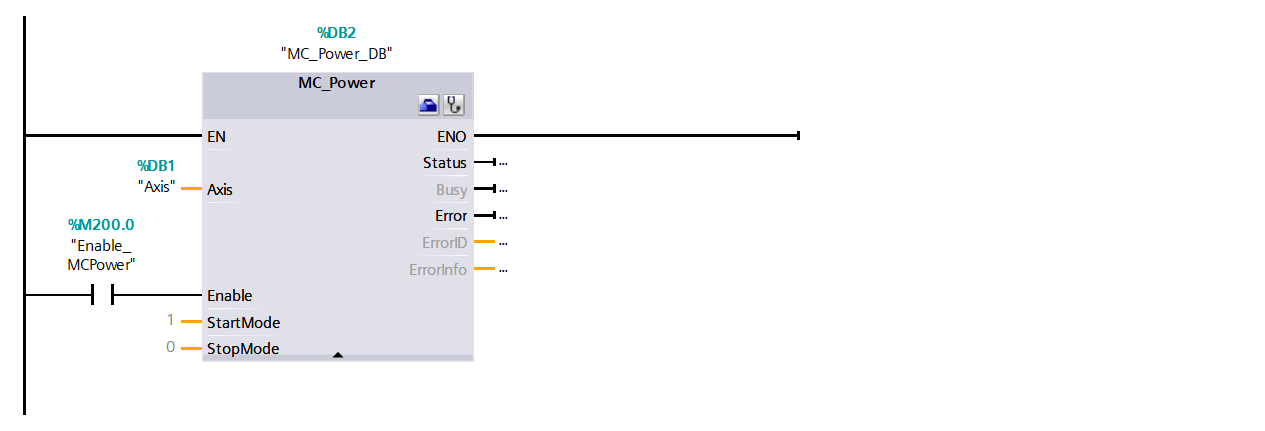
MC_Power – é uma função que deve ser chamada e ligada antes de qualquer instrução de movimento, sem ela não será possível comando o servo.
Principais parâmetros:
-
Axis: Nome do servo/eixo configurado
-
Enable: Entrada do sinal que irá ligar o servo
MC_Home ¶
MC_Home – é a função responsável de levar o servo até ao local onde está situado o sensor configurado para “homing”, a sua posição inicial.
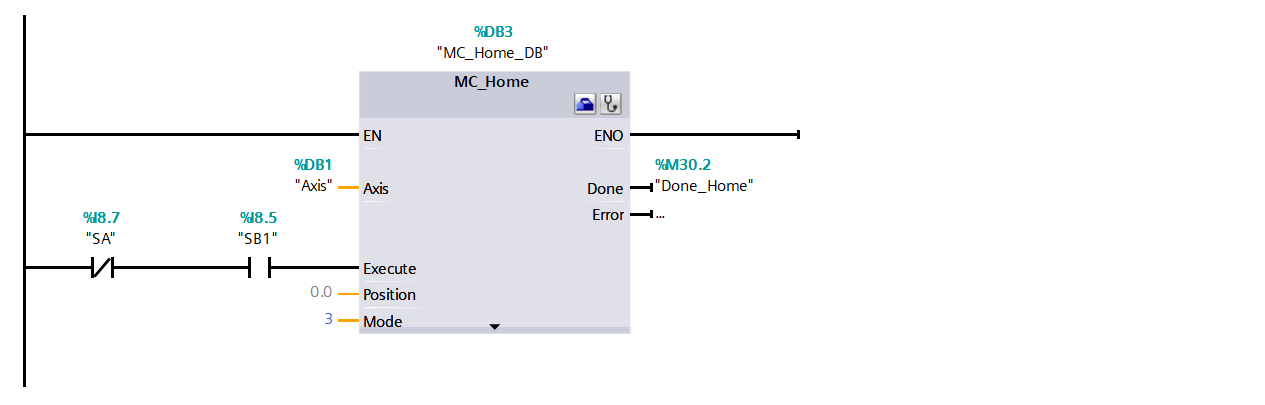
Principais parâmetros:
-
Axis: Nome do servo/eixo configurado
-
Execute: Entrada do sinal que irá ditar a ordem de movimento do servo
-
Position: Valor absoluto da localização do servo, após ter chegado à posição home (coordenada absoluta de home)
-
Mode: Permite escolher entre os diferentes tipos de “homing”
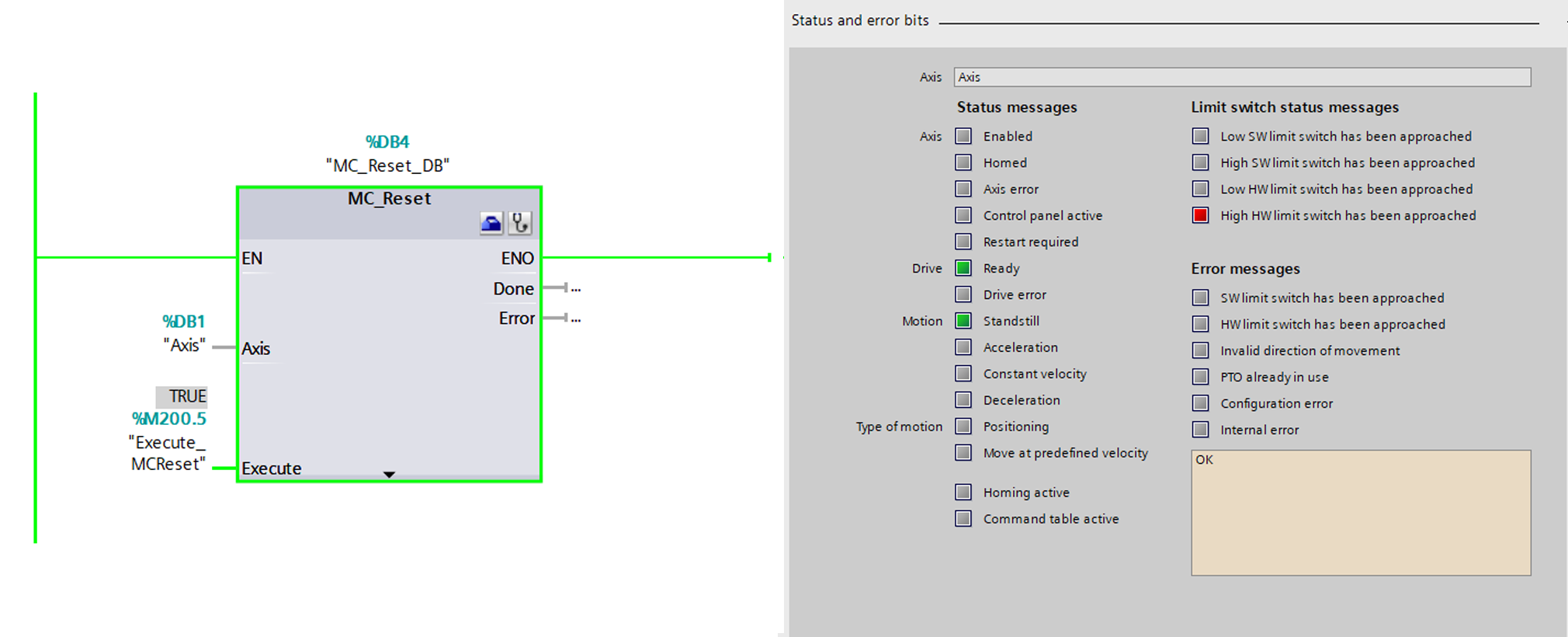
MC_Reset ¶
MC_Reset – é a função que permite ignorar erros causados pela paragem do servo ao entrar em contacto com um fim de curso ou erros de configuração.
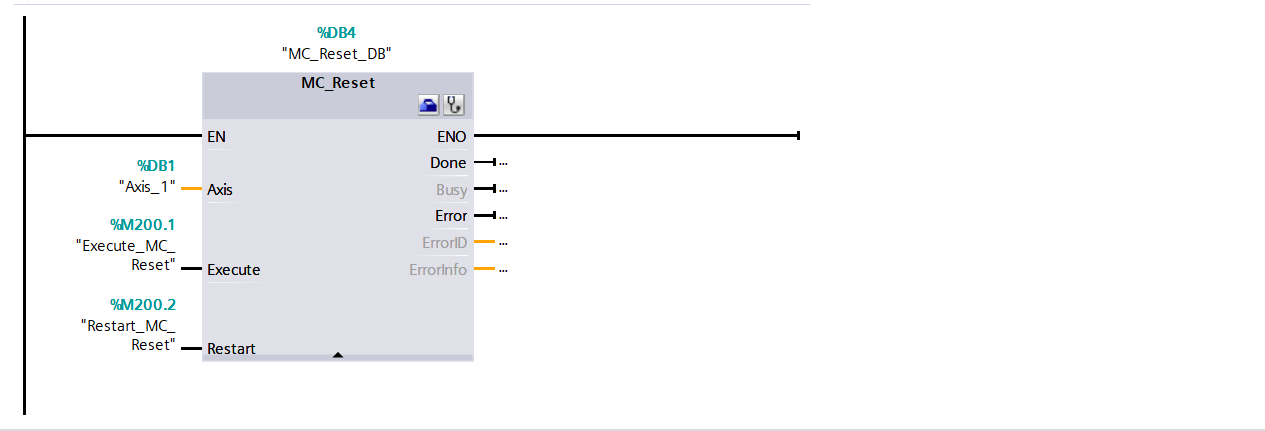
Principais parâmetros:
-
Axis: Nome do servo/eixo configurado
-
Enable: Entrada do sinal que irá ditar a ordem de reset
MC_Halt ¶
MC_Halt – é a função que para os movimentos do servo.
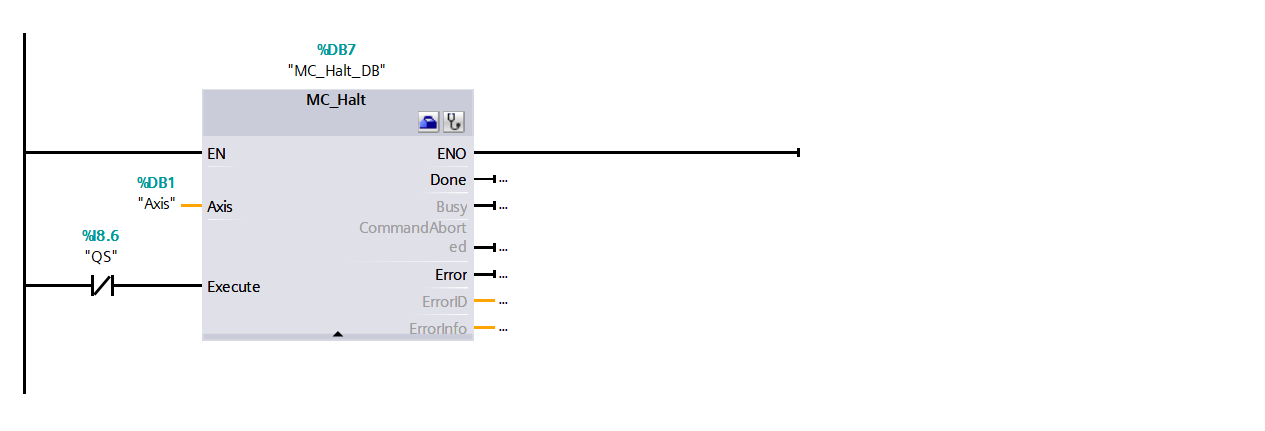
Principais parâmetros:
-
Axis: Nome do servo/eixo configurado
-
Enable: Entrada do sinal que irá parar o servo
MC_MoveJog ¶
MC_MoveJog – é uma das funções de movimento do servo, esta em especifico permite que o servo se mova enquanto uma das entras permaneça ativa.
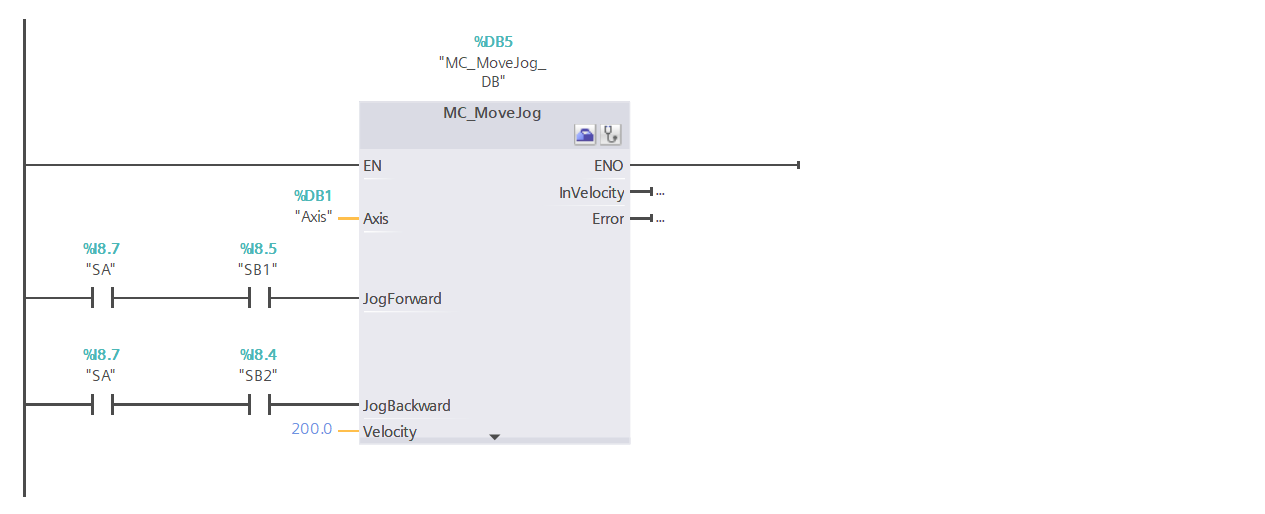
Principais parâmetros:
-
Axis: Nome do servo/eixo configurado
-
JogForward: Move o servo para coordenadas superiores
-
JogForward: Move o servo para coordenadas inferiores
-
Velocity: Velocidade com a qual o servo executará os movimentos
MC_MoveAbsolute ¶
MC_MoveAbsolute – é a função responsável por levar o servo até uma posição absoluta através de uma coordenada.
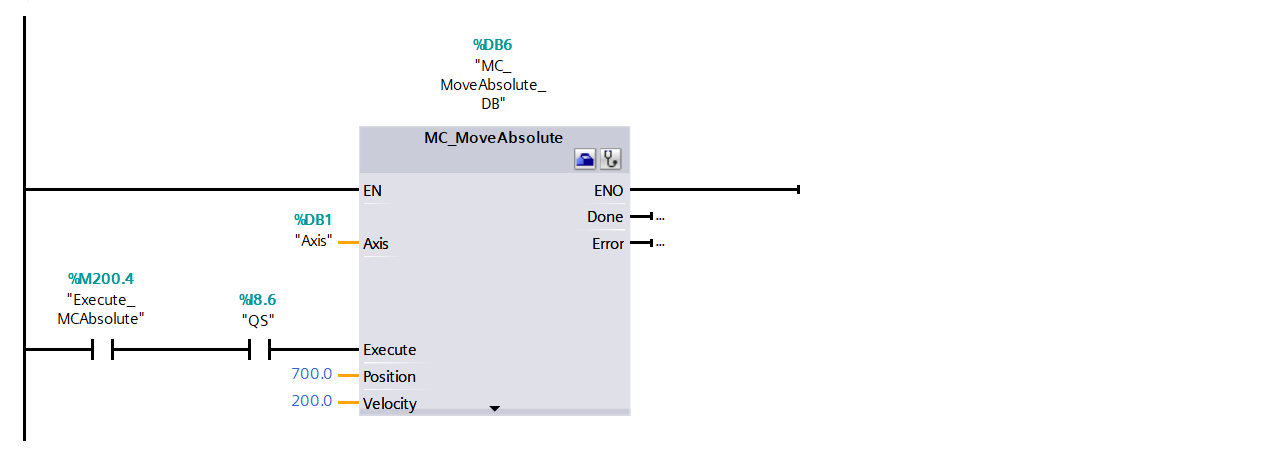
Principais parâmetros:
-
Axis: Nome do servo/eixo configurado
-
Execute: Entrada do sinal que irá ditar a ordem de movimento do servo
-
Position: Coordenada absoluta para a qual o servo se irá mover
-
Velocity: Velocidade com a qual o servo executará o movimento
MC_MoveRelative ¶
MC_MoveRelative – é a função responsável por mover o servo uma determinada distancia relativamente à sua atual coordenada.
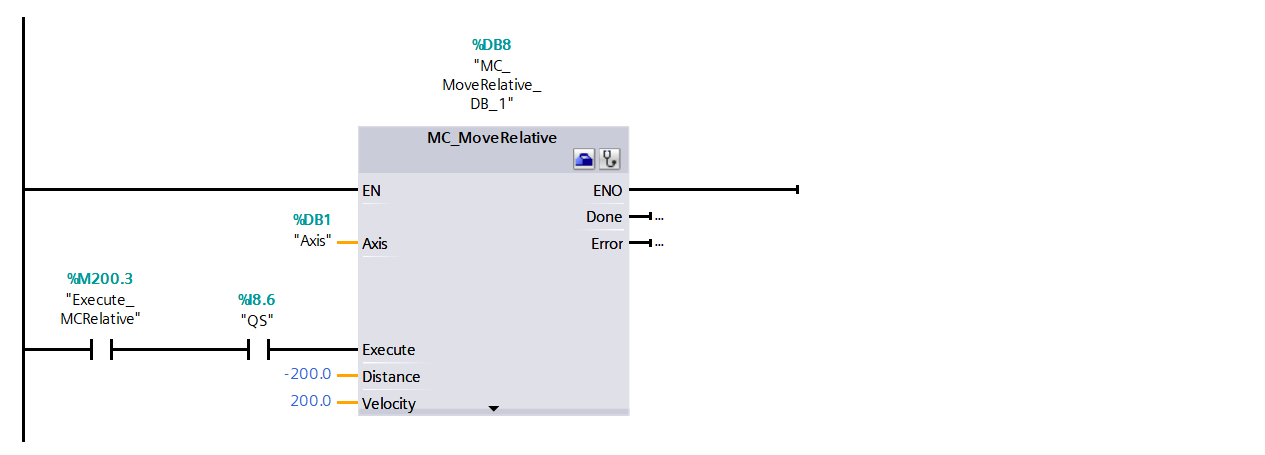
Principais parâmetros:
-
Axis: Nome do servo/eixo configurado
-
Execute: Entrada do sinal que irá ditar a ordem de movimento do servo
-
Distance: Distancia do ponto de referencia a qual o servo de moverá
-
Velocity: Velocidade com a qual o servo executará o movimento
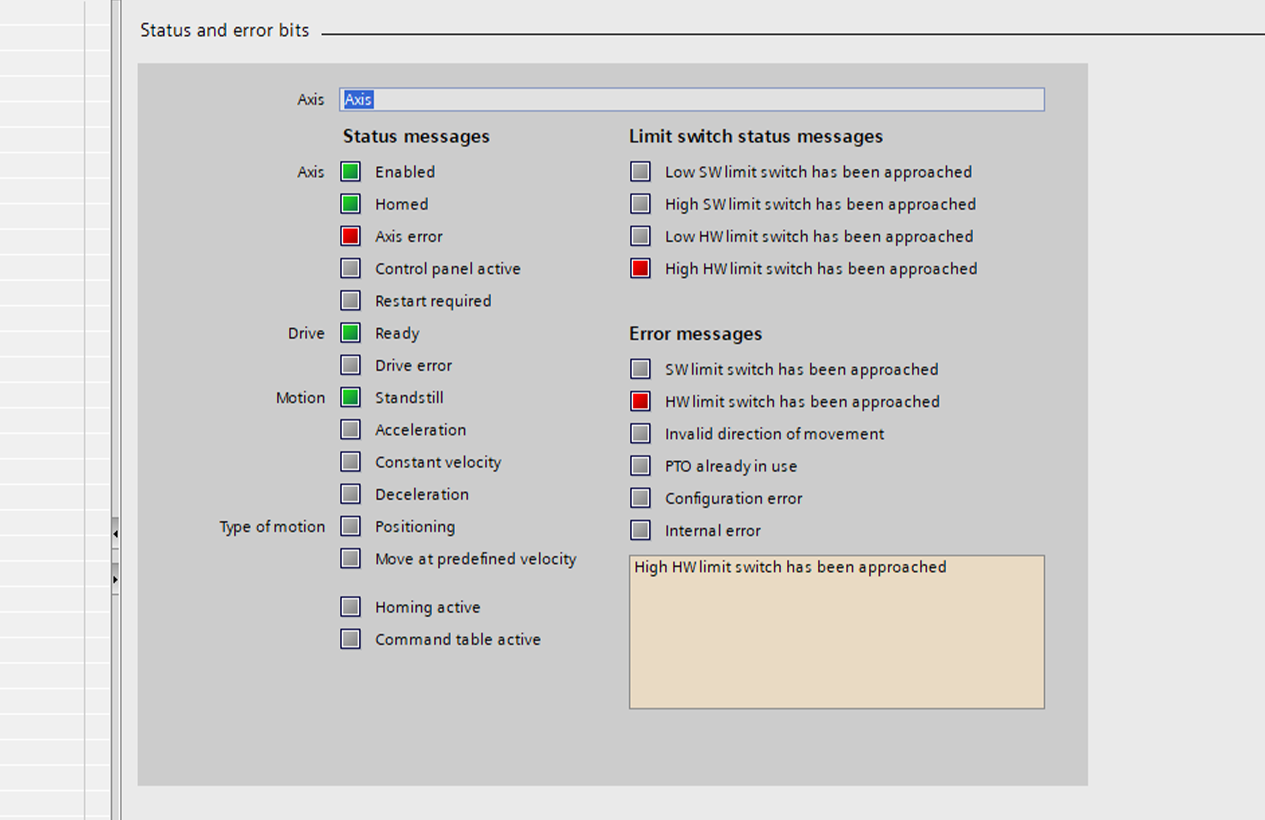
Axis Error ¶
Assim que o servo dispara a paragem de emergência quando um dos fins de curso é acionado, é necessario remover a emergência usado os blocos "MC_Power" e "MC_Reset" anteriomente explicados.
Resolução ¶
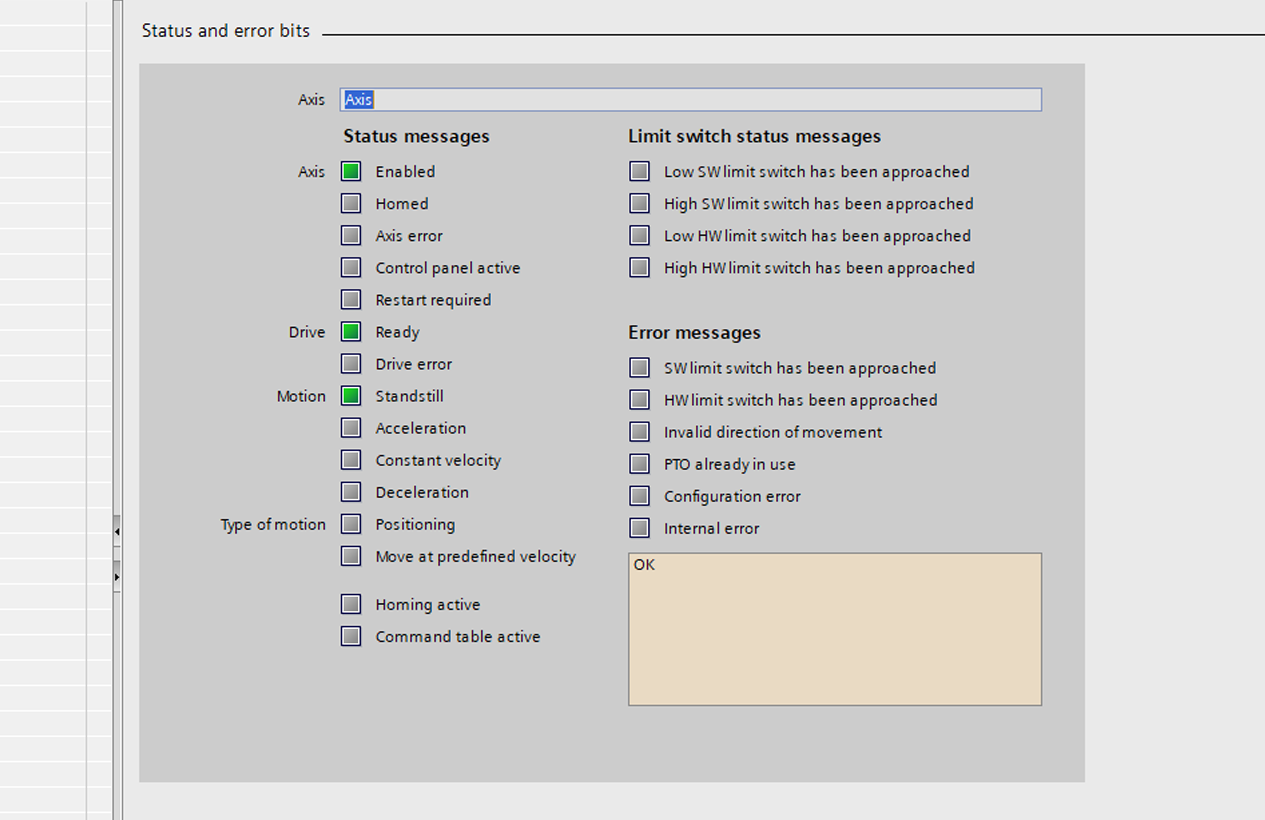
1.Assim que um dos fins de curso é acionado, consulte o "Status" do Axis, clique em " Technology objects > Axis > Diagnostics e dê duplo-clique sobre “Status and error bits”
NOTA: Para sabermos o estado do Axis é necessário clicar em "Monitor All"
2.Para remover o "Axis Error" é necessário fazer o "Disable" no bloco "MC_Power" . Após o fazer volte ao Diagnostics e deve obter o resutlado apresentado na "Figura 35"
3.Com o "disable" feito, no bloco "MC_Reset" , faça o "Execute" . Após o fazer volte ao Diagnostics e deve obter o resutlado apresentado na "Figura 37"
4.Para fazer o "Disable" do "HW limit switch has been aprroached" é necessário mover o carrinho, de forma, a não fazer contacto com os fins de curso.
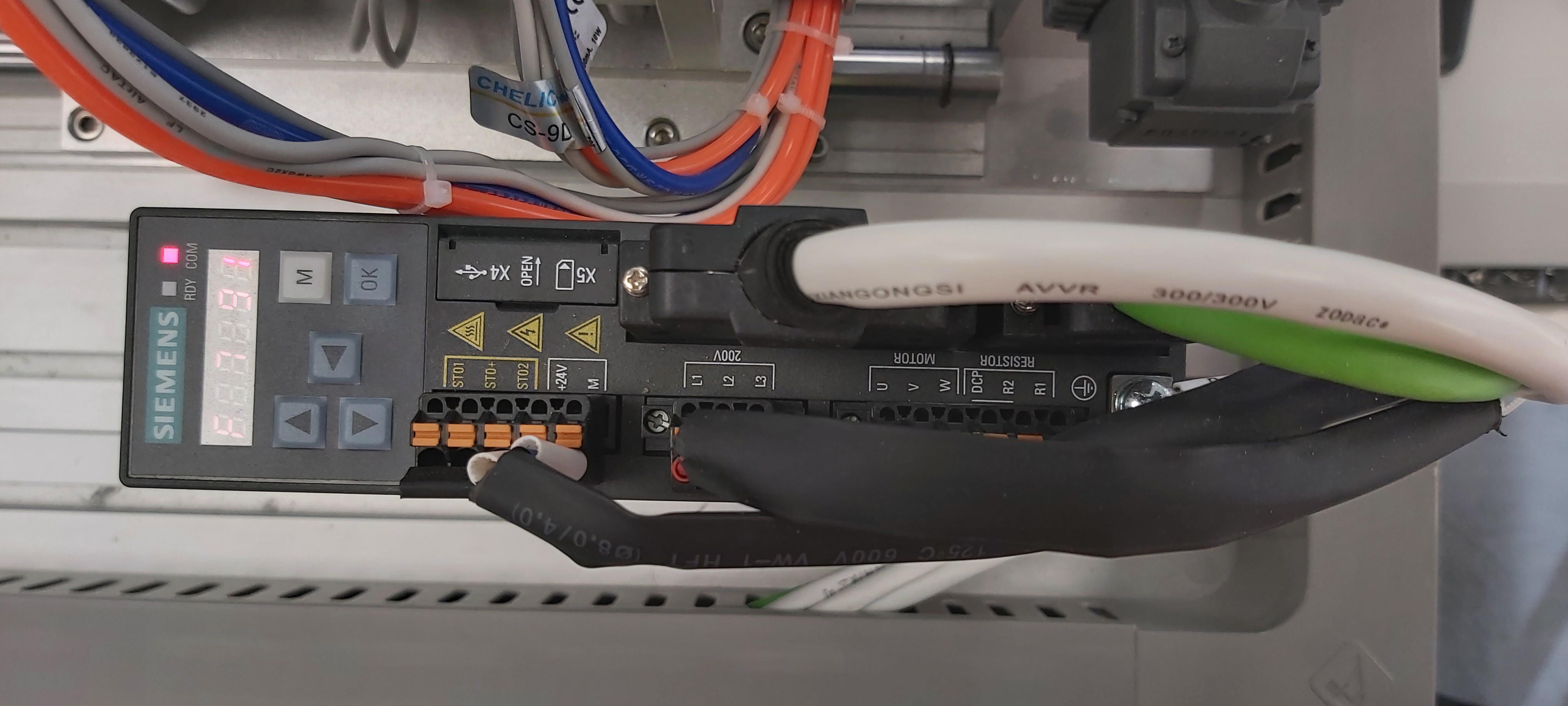
5.Com o "Disable" do "Axis Error" e do "HW limit switch has been aprroached" no “Status and error bits” e necessário fazer o "Reset" ao "Servo-Motor" . Atualmente o Servo-Motor deve estar no estado apresentado na Imagem 38 (COM - Luz Vermelha Permanente; RDY - Luz Vermelha a Piscar) . Para fazer o "Reset" é necessário carregar nos botões "M" "Ok" em simultâneo, durante 5 segundos, desta forma, o COM - Desliga; e o RDY - Luz Laranja Permanente . Assim que o COM - Luz Vermelho Permanente e o RDY - Luz Verde Permanente o servo motor encontra-se sem erros.
NOTA: Ativar o "Enable" no bloco "MC_Power"

6.E fica concluída a resoluação do erro no Axis.